|
|
![]()
(utilizando las interfaces FlowGo y/o fischertechnik)
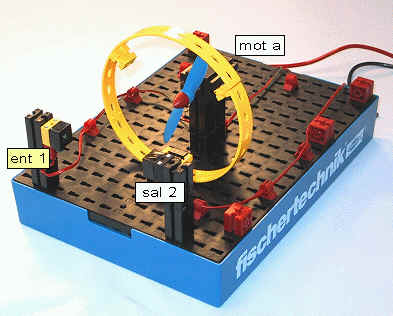
Conecta un motor c.c en una salida
digital. Utiliza los monitores reducido y
amplio para controlar manualmente el encendido y apagado del motor
pulsando en la casilla correspondiente a la salida.
Si no sucede nada, ¿has probado a quitar el modo simulación (menú Control/Simular)?.
En el caso de la interfaz fischertechnik, cuando pulsas para activar la salida, ésta no permanece activada permanentemente debido a razones internas de la programación de Flowol y de la propia interfaz. Utiliza en su lugar el sencillo software Diagnóstico de interfaz que se instala junto con el lenguaje LLWin de fischertechnik (es el equivalente a los monitores de Flowol).
Conecta un motor c.c en una salida de motor. Utiliza los monitores reducido y amplio para controlar manualmente el encendido, apagado, inversión y regulación de velocidad del motor, pulsando en la casilla correspondiente a la salida (observa el efecto de pulsar con el botón derecho o izquierdo del ratón) y utilizando la barra deslizante para regular la velocidad
La regulación de velocidad sólo está disponible en la interfaz FlowGo, no en la fischertechnik.
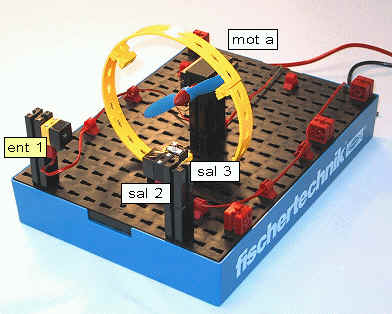
Construye un interruptor elemental y conéctalo
en una entrada digital. Utiliza los monitores
reducido y amplio para observar el valor que toma la entrada cuando
cierras y abres el interruptor.
Si no sucede nada, prueba a pulsar el botón Ejec de la barra de herramientas para que la interfaz inicie la
"escucha" de las entradas.
Construye un cable de sensor analógico y conecta un potenciómetro lineal de 10 K en una de las entradas analógicas. Constrúyase el cable en el caso de la interfaz FlowGo, la conexión puede ser directa para la interfaz fischertechnik, pero téngase en cuenta que el fondo de escala de esta última se obtiene con 5K. Utiliza los monitores reducido y amplio para observar el valor de la entrada cuando modificas la resistencia del potenciómetro.
Observa que en la interfaz FlowGo el valor de la entrada analógica varía entre 0 y 100 (fondo de escala del 100%), tomando sólo valores enteros. Cuando aprendas a realizar adquisición de datos con Flowol podrás observar mediante gráficas o archivos de datos que la señal experimenta aprox. 2.5 pasos por cada unidad. Esto hace pensar que las entradas analógicas son capaces de discriminar unos 250 niveles, lo que se correspondería con una conversión analógico-digital de 8 bits, 28=256.
Si utilizas Diagnóstico de interfaz con la interfaz fischertechnik, observa que la entrada analógica varía entre 0 y 1023 (fondo de escala de 1023 unidades -se corresponde con una conversión analógico-digital de 10 bits, 210=1024 -).
![]()
![]()
Conecta un actuador (motor c.c., lámpara o LED -con resistencia de protección de 470 W-) a la 1ª salida digital y actívala durante 5 segundos. Solución
Conecta un motor c.c. a la 1ª salida de motor y ponlo en marcha a máxima potencia durante 5 s., detenlo unos instantes y ponlo en marcha atrás a la mitad de la potencia máxima durante otros 5 s (sólo con FlowGo, que cuenta con salidas de motor con regulación de velocidad). Solución
Conecta un interruptor elemental a la 1ª entrada digital y comprueba su estado permanentemente cada décima de segundo. Emite un sonido de aviso en caso de que la entrada se halle activada. Solución
![]()
![]()

Realiza el programa utilizando subprogramas y:
a) con un solo punto de inicio; Solución
b) con varios puntos de inicio; Solución
![]()
![]()
Utilícese la interfaz de control de fischertechnik (por simplicidad en el cableado) y realícense estas actividades:
Se han instalado nuevos secadores de manos en los aseos del Centro. Están equipados con un detector óptico de presencia (barrera luminosa) de modo que se activa/desactiva automáticamente el ventilador del secador.
En esta actividad se utilizarán:
1 salida de motor: para el ventilador
1 salida digital: para la lámpara (lenticular) de la barrera óptica
1 entrada digital: para el fototransistor de la barrera óptica
El motor se puede conectar a la primera salida de motor (1ª
salida digital) y la lámpara
a la segunda salida digital, de la interfaz de control.
El fototransistor se puede conectar a la primera entrada digital de la interfaz.
Utiliza el monitor amplio para poner etiquetas a cada E/S utilizada, especificando a qué tipo de sensor o actuador corresponde. Borra las etiquetas de las E/S que no utilices.
Para montaje del modelo véase "Instrucciones de montaje" del Computing Starter de fischertechnik, página 6.
Prográmese el secador de modo que tan pronto como la barrera luminosa es interrumpida por unas manos, el ventilador se ponga en marcha durante 8 s. Solución.
El profesor de Tecnología, que está siempre pendiente de buscar nuevas formas de ahorro de energía, no está conforme con que el secador continúe funcionando a pesar de que se hayan retirado las manos. Así pues, prográmese el secador de modo que se detenga inmediatamente cuando se retiran las manos. Solución.
Se podría decidir que el secador se apagara automáticamente incluso si las manos no se han retirado, para evitar gastos y calentamientos innecesarios del sistema. Modifíquese el programa para conseguirlo. Solución.
Añádase un calentador de aire en el secador (simulado, por ejemplo, mediante una lámpara esférica) y modifíquese consecuentemente la programación.
![]()
![]()
Se está instalando un semáforo enfrente de tu casa. Puesto que el ingeniero instalador de la compañía tiene demasiado trabajo le ofreces programar el semáforo. El ingeniero te explica cómo debe ser la secuencia de control, aunque primero se debe completar el montaje.
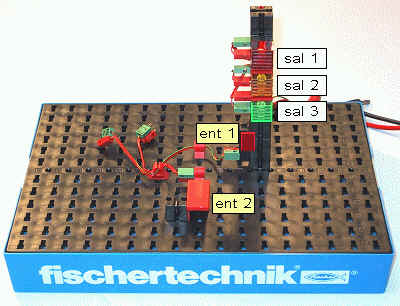
En esta actividad se utilizarán:
3 salidas digitales: para las 3 lámparas del semáforo
2 entradas digitales: para dos pulsadores, uno de peatón y otro de control general
Las 3 lámparas se pueden conectar a las tres primeras salidas
digitales.
Los 2 pulsadores se pueden conectar a las dos primeras entradas digitales.
El semáforo debe estar habitualmente en verde. Si un peatón activa el pulsador, la luz debe cambiar a ámbar un segundo después -y activar una sirena- y permanecer en dicho color durante 4 s. Luego debe permanecer en rojo durante 10 y, finalmente, apagar la sirena y permanecer otra vez en verde. Solución.
El ingeniero olvidó en primera instancia decirte que existe un segundo pulsador en el armario de control de semáforos cercano al cruce. Cuando se pulsa este elemento el semáforo debe permanecer con la luz ámbar parpadeando hasta que se vuelve a pulsar. Le aseguras al ingeniero que integrarás lo antes posible esta función en el programa de control. Solución.
![]()
![]()
Se ha instalado un nuevo sistema de aire acondicionado en tu casa. Por supuesto, preguntas inmediatamente al instalador cómo funciona el sistema de control de la temperatura. Él te explica que un sensor de temperatura mide constantemente la temperatura de la habitación y, tan pronto como ésta excede un valor umbral seleccionado, el refrigerador se activa. Cuando la temperatura cae de nuevo por debajo del valor umbral el refrigerador se desactiva y el calentador entra en funcionamiento.
En esta actividad se utilizarán:
1 salida de motor: para el motor del refrigerador
1 salida digital: para la lámpara (esférica) del calentador
1 entrada analógica: para el sensor NTC
El motor se puede conectar a la primera salida de motor (1ª
salida digital) y la lámpara a la segunda salida digital, de la interfaz de control.
El sensor NTC se puede conectar a la primera entrada analógica.
Para montaje véase "Instrucciones de montaje" del Computing Starter de fischertechnik, página 13.
Quieres programar el sistema anterior pero te parece complicado en primera instancia controlar de forma simultánea el refrigerador y el calentador, así que decides que el calentador actúe permanentemente y programar el refrigerador para que mantenga la temperatura inferior a 50 (unidades porcentuales del sensor de temperatura). Solución.
Programa ahora tanto el sistema de calentamiento como el de refrigeración para que mantenga la temperatura de la habitación por encima de 45 (unidades porcentuales del sensor de temperatura) y por debajo de 50. Solución.
![]()
![]()
Para ello, programas el regulador de temperatura para que funcione del modo descrito
en la tarea 1.
Realizas un registro
gráfico a tiempo real del sensor de temperatura, del estado
del refrigerador y del calentador durante 5 minutos.
Aproximas un termómetro para anotar la temperatura antes de conectar el
regulador (temperatura ambiente) y cuando el regulador se estabiliza en la
temperatura de consigna -esto te permitirá calibrar el detector y convertir
las unidades de % a ºC-.
Realizas una exportación
de datos a hoja de cálculo para estudiar:
![]()
![]()
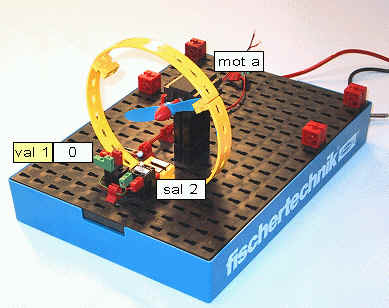
Un taller mecánico cercano a tu casa ha adquirido un robot de soldadura para llevar a cabo la manufactura y reparación de bastidores metálicos. El propietario, amigo tuyo, conoce tu gusto por la robótica y tu preparación como programador, y te pide ayuda para ponerlo en funcionamiento. Tú decides hacerlo paso a paso, comenzando por procesos sencillos, para finalizar con una programación completa de las posibilidades del robot.
En esta actividad se utilizarán:
1 salida de motor: para el motor de la "cintura" del brazo soldador.
1 salida digital: para la lámpara que representa el electrodo de soldadura.
3 entradas digitales: 1 para el final de carrera que marca la posición origen (home) del brazo, 1 para un pulsador que actuará como contador de pasos del motor, y 1 para un pulsador de "Inicio" de operación.
y la interfaz inteligente fischertechnik.
El motor se puede conectar a la primera salida digital/de motor
(M1) y la lámpara a la segunda salida digital/de motor (M2), de la interfaz de control.
El final de carrera (pulsador) se puede conectar a la 1ª entrada digital (E1) y el
contador de pasos (pulsador) a la 2ª (E2). El pulsador de "Inicio" a la 8ª
(E8).
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" del Computing Starter de fischertechnik, página 21.
Tarea 1
Realiza un programa para llevar el brazo soldador desde cualquier posición en la que se encuentre situado hasta su posición origen (home). Solución.
Nota: según el montaje, el final de carrera que marca la posición home queda a la derecha del brazo. Háganse las conexiones en el motor de forma que llevar el brazo a posición home corresponda a hacer girar el motor "hacia atrás" (con la orden "
Activar Motor a atrás").
Tarea 2
Realiza un programa que avance el brazo 25 pasos de motor y después le haga retroceder otros 25 pasos.
Diseñando un subprograma para el avance de un paso y utilizando la llamada repetida al mismo. Solución.
Diseñando un subprograma para el avance de un número ajustable de pasos (mediante un contador). Solución.
Tarea 3
Programa la siguiente trayectoria para el brazo de robot:
gira 25 pasos avanzando; da un punto de soldadura
gira 50 pasos avanzando; da un punto de soldadura
gira 25 pasos retrocediendo; da un punto de soldadura
vuelve a la posición base
utilizando referencias relativas para las posiciones del mismo (es decir, a partir de una posición, establecer el nº de pasos hasta alcanzar la siguiente). Solución.
Tarea 4
Programa la anterior trayectoria para el brazo
utilizando referencias absolutas para las posiciones del mismo (es decir,
estableciendo el nº de pasos siempre con respecto a la posición origen -home-).
Utiliza el pulsador de "Inicio", de forma que cuando se pulse, se
lleve a cabo de nuevo desde el principio la trayectoria programada (una vez se
haya finalizado completamente la trayectoria actual). Solución.
![]()
![]()
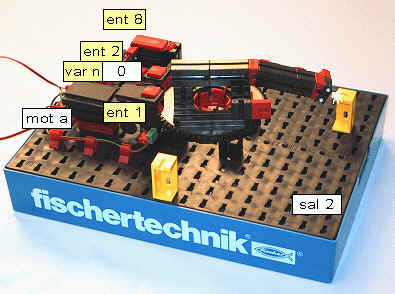
En el taller de tu amigo se necesita un transporte inteligente que sea capaz de llevar las piezas de los bastidores metálicos a los lugares adecuados en los momentos precisos. Por tanto, decide adquirir también un robot móvil cuya programación sea capaz de satisfacer las necesidades previstas. Apelando a tu amistad, te pide ayuda de nuevo para poner en marcha un modelo básico que le han proporcionado en período de prueba.
En esta actividad se utilizarán:
2 salidas de motor: para los dos motores que mueven independientemente ambas ruedas del robot.
2 entradas digitales: para los dos contadores de pasos de los motores.
y la interfaz inteligente fischertechnik.
Los motores se pueden conectar a las 2 primeras salidas digitales/de motor (M1 y M2) y los contadores de pasos se pueden situar en las entradas E1 y E2.
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II de fischertechnik, página 4.
Tarea 1
Realiza un programa que haga avanzar el robot en línea recta durante 3 s, después gire a la derecha durante 1 s, gire sobre sí mismo durante otros 3 s y, finalmente, retroceda marcha atrás durante 2 s. Solución.
Tarea 2
Realiza un programa que haga avanzar el robot en línea recta durante 40 pasos de motor, se detenga un instante y retroceda a su posición original:
Diseñando un subprograma para el avance de un paso y utilizando la llamada repetida al mismo. Solución.
Diseñando un subprograma para el avance de un número ajustable de pasos (mediante un contador). Solución.
Utilícese la interfaz de control de fischertechnik (por simplicidad en el cableado y porque cuenta con 8 entradas digitales que serán utilizadas en su totalidad -2 más que la interfaz FlowGo) y realícense estas actividades:
Robots industriales
El taller mecánico de tu amigo ha prosperado considerablemente
gracias a la modernización de sus medios en los procesos de producción, con el
apoyo de los automatismos y la robótica. El robot básico de soldadura se les
ha quedado pequeño para los pedidos que tienen en la actualidad, de modo que
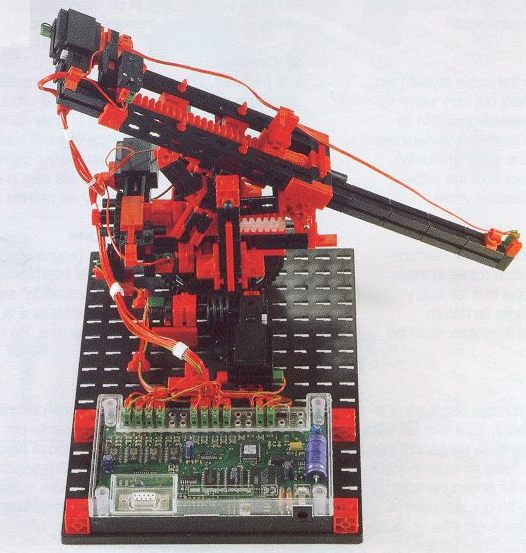
deciden adquirir un modelo más rápido y refinado: un brazo soldador con tres
articulaciones independientes.
De nuevo te solicita tu ayuda para la puesta en marcha del mismo.
|
 |
En esta actividad se utilizarán:
3 salidas de motor: para las tres articulaciones del robot (cintura, hombro y extensión del antebrazo)
1 salida digital: para la lámpara lenticular que simula el electrodo de soldadura.
6 entradas digitales: 3 para los pulsadores de final de carrera de cada articulación, y 3 para los pulsadores que actúan como contadores de pasos de los motores.
Los motores se pueden conectar a las 3 primeras salidas digitales/de motor (M1, M2, M3) y la lámpara a la cuarta salida digital/de motor (M4), de la interfaz de control. Los finales de carrera, que marcan las posiciones origen (home) de cada articulación, y los contadores de pasos de cada motor se pueden distribuir en las entradas de esta forma:
| Motor | Final de carrera | Contador de pasos |
| M1 (rotación cintura) |
E1 | E2 |
| M2 (codo: extensión antebrazo) |
E3 | E4 |
| M3 (giro hombro) |
E5 | E6 |
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Industry Robots de fischertechnik, página 12.
Tarea 1
Para familiarizarte con el robot lees primeramente toda su documentación, pero decides descubrir por ti mismo algunas de sus características: tipo, espacio de trabajo, velocidad media de desplazamiento de sus articulaciones, exactitud en el posicionado de la cabeza de soldadura, etc.
- Identifica el tipo y configuración morfológica del robot, el nº de grados de libertad y el tipo de cada articulación. Solución.
- Para determinar el espacio de trabajo necesitas conocer los desplazamientos mínimo y máximo (en nº de pasos y/o en m) que es capaz de realizar cada articulación, y la trayectoria concreta que sigue el elemento terminal en el movimiento de cada una. Puedes hacer una representación aproximada a escala del espacio de trabajo, dibujando en planta y el perfil las trayectorias extremas del elemento terminal. Solución.
- La velocidad media de desplazamiento. Solución.
- La repetibilidad en el posicionado del elemento terminal. Solución.
Tarea 2
El manejo simultáneo de las tres articulaciones del robot te parece complicado en primera instancia, habida cuenta que el último que programaste sólo tenía un grado de libertad. Así, decides programar una trayectoria de soldadura de prueba utilizando el movimiento simultáneo de sólo dos articulaciones: la cintura y el codo (extensión del antebrazo):
| Cintura | Codo | Acción |
| home | home | |
| 28 | 80 | soldar |
| 56 | 40 | soldar |
| 84 | 20 | soldar |
| home | home |
En dicha trayectoria se consideran las posiciones absolutas en pasos (tomando siempre como origen las posiciones home). Solución.
Tarea 3
Finalmente, programas el movimiento simultáneo de las tres articulaciones del robot para acometer los problemas reales del taller. Concretamente, tu primer trabajo consiste en programar la soldadura de la tapa superior de un barril cilíndrico de 30 cm de diámetro y 4.5 cm de altura situado sobre el suelo a unos 35º con respecto al brazo cuando se halla en posición home, y a una distancia de aprox. 37 cm respecto al eje de la cintura, dando tres puntos de soldadura:
![]()
![]()
La fabricación y reparación de grandes bastidores metálicos
en el taller, ha hecho necesario pensar en utilizar un robot manipulador que
maneje grandes piezas y las sitúe y acople con precisión antes de que el robot
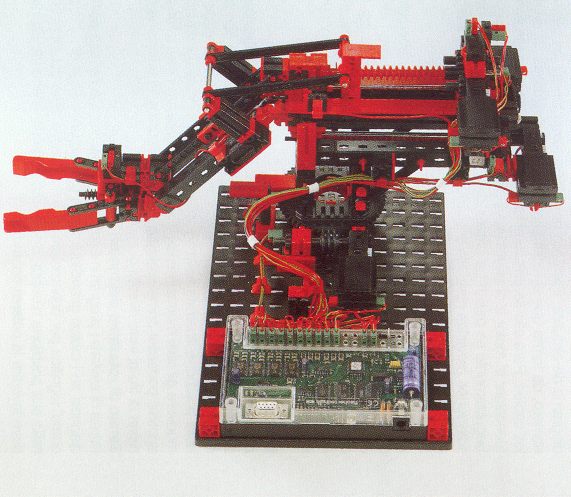
de soldadura cumpla con su misión. Así pues, tu amigo adquiere un brazo
articulado de tres grados de libertad cuyo elemento terminal es una pinza,
aunque también puede ser substituida por otros elementos (como otro electrodo
de soldadura).
Tu amigo necesita ahora tu ayuda permanente para para el mantenimiento y la
actualización de la programación de su parque de robots, así que decide
contratarte en su empresa.
Tu primer trabajo consiste en poner en marcha el nuevo robot.
|
|
En esta actividad se utilizarán:
4 salidas de motor: para las tres articulaciones del robot (cintura, hombro, codo) y la pinza (garra).
8 entradas digitales: 4 para los pulsadores de final de carrera que marcan las posiciones origen (home) de cada articulación, y 4 para los pulsadores que actúan como contadores de pasos de cada motor.
Los motores se pueden conectar a las 4 primeras salidas digitales/de motor (M1, M2, M3, M4). Los finales de carrera y los contadores de pasos de cada motor se pueden distribuir en las entradas así:
| Motor | Final de carrera | Contador de pasos |
| M1 (rotación cintura) |
E1 | E2 |
| M2 (avance hombro) |
E3 | E4 |
| M3 (giro codo) |
E5 | E6 |
| M4 (pinza) |
E7 | E8 |
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Industry Robots de fischertechnik, página 29.
Tarea 1
Para familiarizarte con el robot lees primeramente toda su documentación, pero decides descubrir por ti mismo, igual que hiciste con el robot soldador, algunas de sus características: tipo, espacio de trabajo, velocidad media de desplazamiento de sus articulaciones, exactitud en el posicionado de la cabeza de soldadura, etc.
- Identifica el tipo y configuración morfológica del robot, el nº de grados de libertad y el tipo de cada articulación. Solución.
- Para determinar el espacio de trabajo necesitas conocer los desplazamientos mínimo y máximo (en nº de pasos y/o en m) que es capaz de realizar cada articulación, y la trayectoria concreta que sigue el elemento terminal en el movimiento de cada una. Puedes hacer una representación aproximada a escala del espacio de trabajo, dibujando en planta y el perfil las trayectorias extremas del elemento terminal. Solución.
- La velocidad media de desplazamiento. Solución.
- La repetibilidad en el posicionado del elemento terminal. Solución.
Tarea 2
Inicialmente decides programar una trayectoria de prueba para comprobar el movimiento simultáneo de todas las articulaciones y de la pinza:
| Cintura | Hombro | Codo | Pinza |
| home | home | home | home |
| 120 | 80 | 55 | cierra |
| 90 | 40 | 30 | abre |
| 60 | 20 | 15 | cierra |
| 30 | 10 | 8 | abre |
| home | home | home | home |
En dicha trayectoria se consideran las posiciones absolutas en pasos (tomando siempre como origen las posiciones home). Solución.
Tarea 3
Finalmente, programas el movimiento simultáneo de las tres articulaciones del robot para acometer los problemas reales del taller. Concretamente, tu primer trabajo consiste en programar la recogida de dos barriles de 3 cm de diámetro y 4.5 cm de altura situados a nivel del suelo en dos posiciones alejadas entre sí, y apilarlos en una posición intermedia. Las posiciones iniciales y final se esquematizan en la siguiente figura:
![]()
![]()
Robots neumáticos
En el taller de tu amigo necesitan clasificar por colores las
tapas circulares de unos barriles, previamente a que el brazo
manipulador sitúe cada una encima de su correspondiente barril, y a que el brazo
soldador les dé los necesarios puntos de soldadura para que el barril quede
tapado.
Por ello, adquiere una estación clasificadora basada en automatismos
neumáticos programables, que cuenta con un sensor óptico capaz de diferenciar
entre los colores blanco y negro. Cuenta, además, con un sistema automático de
empuje que aproxima las piezas a la barrera óptica para que ésta discrimine su
color (la alimentación de las piezas se lleva a cabo por la parte superior de
un cilindro que permite apilarlas y dirigirlas hasta el mecanismo de empuje).
Finalmente, dos cilindros neumáticos permiten desplazar lateralmente una guía
para llevar las piezas clasificadas a sus correspondientes contenedores.
En esta actividad se utilizarán:
4 salidas de digitales/de motor: 3 para las electroválvulas que controlan el movimiento de dos cilindros neumáticos de doble efecto que permiten desplazar una guía a izquierda o derecha, y una para el motor del sistema empujador de piezas.
2 entradas digitales: una para el pulsador que actúa como contador de pasos del motor del empujador, y otra para el fototransistor que constituye el detector del sistema óptico de clasificación del color de las piezas (blanco o negro).
La lámpara lenticular que constituye la fuente de luz de la barrera óptica se halla permanentemente conectada a la alimentación, de modo que no consume una salida digital.
Las electroválvulas se pueden conectar a las 3 primeras salidas
digitales (M1, M2, M3) y el motor a la cuarta (M4).
El fototransistor se puede conectar a la entrada E1 y el pulsador a la E2.
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Pneumatic Robots de fischertechnik, página 11.
Tarea 1
Realiza un programa para que el sistema almacene automáticamente las piezas blancas en un contenedor situado a la izquierda de la guía de empuje y las piezas negras en un contenedor situado a la derecha. Solución.
![]()
![]()
Robots móviles
Una vez realizada con éxito la prueba básica con el robot móvil que habéis adquirido para el taller, queréis que cumpla la siguiente misión: desplazar las piezas de los bastidores metálicos desde el hangar de carga hasta la zona de soldadura y, tras el proceso de soldado, desde ésta hasta la zona de "paletización". Todo ello sin la intervención de un operario, es decir, únicamente mediante programación.
Para ello, decidís utilizar pistas coloreadas sobre el suelo de la nave para guiar al robot desde los puntos origen hasta los puntos de destino, y acopláis al robot de un sistema auxiliar de sensores ópticos capaz de reconocer dichas pistas, de forma que, con la adecuada programación, el robot sea capaz de desplazarse sobre ellas en trayectorias de ida y vuelta.
En esta actividad se utilizarán:
3 salidas de motor:
2 para los motores que mueven independientemente ambas ruedas del robot, y
1 para la lámpara que proporciona la iluminación del sistema óptico de detección de las pistas.
5 entradas digitales:
2 para los dos pulsadores que actúan como contadores de pasos de los motores,
2 para los dos fototransistores que actúan como sensores ópticos de localización de las pistas, y
1 para un pulsador de "inicio/parada" ("reset").
y la interfaz inteligente fischertechnik.
Los motores se pueden conectar a las 2 primeras salidas digitales/de motor (M1 y M2), la lámpara a la salida M3, los contadores de pasos se pueden situar en las entradas E1 y E2, y los fototransistores en las entradas E3 y E4. El pulsador de inicio se puede situar en la entrada E8.
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II de fischertechnik, página 24.
Tarea 1
Realiza un programa para que el robot se desplace sobre una pista de color negro de aproximadamente 2 cm de anchura (por ejemplo, una pista de cinta aislante de color negro). Supón que en el instante inicial el robot se halla sobre la pista. Si en algún momento la pierde, debe detenerse. Solución.
Tarea 2
Modifica el programa anterior para que en el instante inicial, o cuando la pista termina, o si el robot la pierde por algún motivo -como un cambio considerable en la dirección de la pista-, la busque realizando un giro de 360º; si no la encuentra, debe desplazarse un poco hacia adelante y buscar de nuevo. Cuando la encuentre, debe seguirla. El botón "inicio" se usa de forma que, mientras permanece pulsado, el robot debe estar en reposo, y sólo cuando se libera, el robot comienza de nuevo su secuencia de operación. Solución.
![]()
![]()
Finalmente, añadís al robot móvil una horquilla de carga para desplazar las paletas con las piezas de los bastidores desde sus lugares de origen hasta los puntos de destino.
En esta actividad se utilizarán:
3 salidas de motor:
2 para los motores que mueven independientemente ambas ruedas del robot, y
1 para la lámpara que proporciona la iluminación del sistema óptico de detección de pistas.
7 entradas digitales:
2 para los dos pulsadores que actúan como contadores de pasos de los motores,
2 para los dos fototransistores que actúan como sensores ópticos de localización de las pistas,
2 para los pulsadores que actúan como finales de carrera de la horquilla de carga, y
1 para un pulsador de "inicio/parada" ("reset")
y la interfaz inteligente fischertechnik.
Los motores se pueden conectar a las 2 primeras salidas digitales/de motor (M1 y M2), la lámpara a la salida M3, los contadores de pasos se pueden situar en las entradas E1 y E2, los fototransistores en las entradas E3 y E4, y los finales de carrera en las entradas E5 y E6. El pulsador de inicio se puede situar en la entrada E8.
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II de fischertechnik, página 26.
Tarea 1
Realiza ahora un programa para que el robot se desplace a lo largo de la pista negra, cuando llegue al final de la misma recoja una paleta con carga, dé media vuelta y retorne por la pista hasta el extremo inicial, donde debe depositar la carga. De nuevo, el robot da media vuelta y trae la siguiente paleta. Repite indefinidamente este ciclo. El botón "inicio" se usa de forma que, mientras permanece pulsado, el robot debe estar en reposo, y sólo cuando se libera, el robot comienza de nuevo su secuencia de operación. No es preciso realizar un algoritmo de búsqueda de la pista. Solución.
![]()
![]()
2004 Víctor R. González