|
|
![]()
Flowol es un lenguaje que permite realizar control programado utilizando diversos interfaces de control ("controladoras") comerciales. Una interfaz de control es un dispositivo de enlace entre un puerto de salida de un ordenador y los componentes eléctricos/electrónicos de un sistema. Proporciona potencia a los componentes eléctricos y actúa como buffer entre los componentes y el ordenador.
Flowol no está diseñado específicamente para gobernar un único dispositivo. Para acceder a la lista de dispositivos que puede controlar se debe utilizar el submenú Interfaz del menú Control:
Este menú da paso el cuadro de diálogo de la siguiente figura:
Como se observa, permite utilizar alrededor de una docena de placas controladoras accesibles mediante puerto serie (Com) y/o USB, entre ellas las de Fischertechnik, LEGO DACTA y FlowGo. El puerto serie que ocupa la interfaz puede seleccionarse mediante los botones de radio Puerto de comunicaciones y Com X.
Un ejemplo de conexión al puerto USB se puede observar a continuación en el caso de la interfaz FlowGo. Cuando se introduce el conector del cable USB adjunto a la interfaz en el puerto USB del ordenador se produce la detección automática del dispositivo y la instalación del archivo controlador de dispositivo correspondiente (caso de Windows 2000/XP):
En el caso de Windows 9x/ME es preciso instalar el software antes de conectar la interfaz. Cuando se finaliza la instalación hay que reiniciar el equipo y, tras conectar la interfaz, si el sistema no busca automáticamente el driver adecuado proporcionado por la instalación anterior, se puede acudir a "Panel de control > Administrador de dispositivos" y en el "Dispositivo Desconocido" denominado "FlowGo/Solo Device" obligar a actualizar el controlador de forma que en la búsqueda encuentra automáticamente el driver correcto.
Cuando el sistema finaliza la detección y la instalación del driver de dispositivo adecuado, ya se puede entrar en Flowol y seleccionar el puerto USB para la utilización de la interfaz.
Una vez seleccionada la interfaz de control de la que disponemos y el puerto correcto mediante el cual se comunica con el PC, podemos guardar la configuración permanentemente mediante el botón Aceptar y guardar.
Elegida la interfaz, las pantallas de monitor reducido (submenú Monitor Reducido... del menú Ventana):

y monitor amplio (submenú Monitor Amplio... del menú Ventana):
permiten
observar a tiempo real el estado de las entradas y salidas de la interfaz (el nº
y características de las entradas/salidas que se muestran depende del tipo de
interfaz que se haya seleccionado).
La etiquetas que se observan (Val, Entrada, Salida, Motor)
son modificables por el usuario para indicar qué tipo de sensor o actuador se
halla en cada entrada o salida, respectivamente.
En la fase de desarrollo de un programa no es preciso tener conectada la interfaz, de modo que se puede poner el sistema en modo Simular (marcando la opción correspondiente del menú Control).
Esto permite diseñar, probar y depurar un programa sin necesidad de la conexión física al interfaz.
Con Flowol utilizaremos principalmente las interfaces de control FlowGo de Data Harvest e Intelligent interface de fischertechnik por su sencillez, versatilidad y equipamiento asociado.
![]()
![]()
Nos referiremos ahora a la interfaz FlowGo, que se muestra en la figura siguiente:
Sus
características principales son:
| Alimentación | Requiere fuente de alimentación con salida de 6V
cc. y 2 A o 4 pilas tipo 'C' o 'D' de 1.5 V (en porta-baterías con conector estándar) Corriente nominal proporcionada a las entradas/salidas: 1.3 A |
||
| Puerto de control | 1 puerto serie RS 232, conector DB 9 1 puerto USB (con conectores y cables para ambos puertos disponibles) |
||
| Salidas | 6 digitales de 6 V, 100 mA 2 de motor, con inversión y regulación de velocidad, 200 mA (modulación de anchura de pulso a 62 Hz). |
||
| Entradas | 4 digitales (sensores on/off) (RONmax=
4K, ROFFmin= 5K5) 2 analógicas (sensores de nivel) (Voltaje de referencia: 2.5 V, 1 mA por canal) |
||
| Indicadores | 6 LED indicadores de salida digital 2 LED indicadores de motor 4 LED indicadores de entrada digital 1 LED indicador de encendido y/o de ejecución de programa memorizado |
||
| Botones | Botón Go para iniciar la ejecución de un programa memorizado | ||
| Memoria | 256 bytes (equivalente al almacenamiento de 100-200 símbolos de Flowol) |
Las clavijas de las entradas/salidas digitales y de motor son del tipo "banana de 4 mm". Para conectar un dispositivo como una lámpara, un LED (protegido por una resistencia de 470 W), un zumbador o un motor de c.c. no hay más que conectar los dos polos en las entradas correspondientes:
![]()
Análogamente para las salidas de motor:
![]()
Los conectores de las entradas analógicas son del tipo "jack estéreo de 3.5 mm", con tres patillas descritas como en la siguiente figura:
 |
A: Tierra
B: V Ref. C: Señal |
 |
 |
Por ejemplo, para medir la resistencia de un potenciómetro
lineal de 10 K, se debe conectar la patilla deslizante (la central) a la Señal (C) y las dos
patillas fijas (las de los extremos) a Tierra (A) y V Ref. (B).
Cuando se lea la entrada del sensor, se obtendrá una lectura 100% cuando la
resistencia del potenciómetro sea 10 K, y una lectura 0% cuando la resistencia
sea 0 K.
(Véase la pág. 21 del manual de la interfaz FlowGo para conectar sensores de luz (LDR) y de temperatura (termistor).
La interfaz puede funcionar en dos modos:
modo en-línea ("on-line", gobernada en todo momento mediante conexión al PC), o
modo descarga: en este modo el procesamiento del programa tiene lugar únicamente en el microprocesador de la interfase, desacoplado del PC. En una primera fase se diseña el programa de control en el PC, luego se descarga en la interfaz y, finalmente, ésta puede cortar el contacto con el PC (de modo que el cable serie o USB puede ser desconectado).
![]()
![]()
Nos referiremos ahora a la "interfaz inteligente" e fischertechnik, que se muestra en la figura siguiente:
 |
 |
Sus características principales son:
| Alimentación | Requiere fuente de alimentación con salida de 9V
cc. y 1 A, Energy Set 30182 de fischertechnik -o cualquier
alimentador universal de dichas características con el polo + en el interior del casquillo-
(conexión en 1, ver la figura); o 1 pila de 9 V, o batería recargable "Accu Set" 34969 de fischertechnik para uso con robots móviles (Mobile Robot II) (conexión en los casquillos 2 de la figura) Limitador de corriente a 1A, resistente a cortos. |
||
| Puerto de control | 1 puerto serie RS 232, conector DB 9 (ver 4 en la figura) | ||
| Salidas | 4 digitales/de motor (con inversión pero sin
regulación de velocidad), 9V, 250 mA M1, M2, M3, M4 (ver 5 en la fig.) |
||
| Entradas | 8 digitales (sensores on/off), E1 - E8, 6 -
12 V, Rentrada= 9 K aprox., nivel de conmutación = 2.8 V
(ver 6 en la fig.) 2 analógicas (sensores de nivel), EX, EY , R = 0-5 K, niveles = 0-1023, tolerancia = 0.2% (ver 7 en la fig.) |
||
| Indicadores | 1 LED rojo indicador de encendido | ||
| Botones | Ninguno | ||
| Memoria | RAM de 32 kByte (para almacenamiento de un programa;
si se interrumpe la alimentación se pierden los datos del mimso). EPROM de 64 kByte (sólo para el software del microprocesador) |
||
| Ampliación | Módulo de extensión para duplicar entradas/salidas digitales conectado mediante regleta de 14 polos (ver 8 en la fig.) |
Las clavijas de las entradas/salidas son de 2 mm, proporcionadas en los diferente modelos de montaje de la línea fischertechnik computing.
En la siguiente figura se puede observar un diagrama de bloques de la composición interna de la interfaz:
Puede funcionar en dos modos:
modo en-línea ("on-line", gobernada en todo momento conectada al PC), o
modo descarga: en este modo el procesamiento del programa tiene lugar únicamente en el microprocesador de la interfase, desacoplado del PC. En una primera fase se escribe el programa de control en el PC, luego se descarga en la interfase y, finalmente, ésta puede cortar el contacto con el PC (de modo que el cable serie puede ser desconectado).
La forma natural de programar la interfaz es el lenguaje LLWin de fischertechnik, pero en modo "on-line" puede ser utilizada mediante cualquier lenguaje de programación. Los detalles acerca de este proceso se pueden encontrar en www.fischertechnik.de. En dicha página figuran algunos drivers diseñados para diferentes lenguajes de programación. Flowol soporta la programación de esta interfaz sin necesidad de instalar drivers adicionales. Sin embargo, si se utiliza Flowol con esta interfaz, no se dispone del modo descarga.
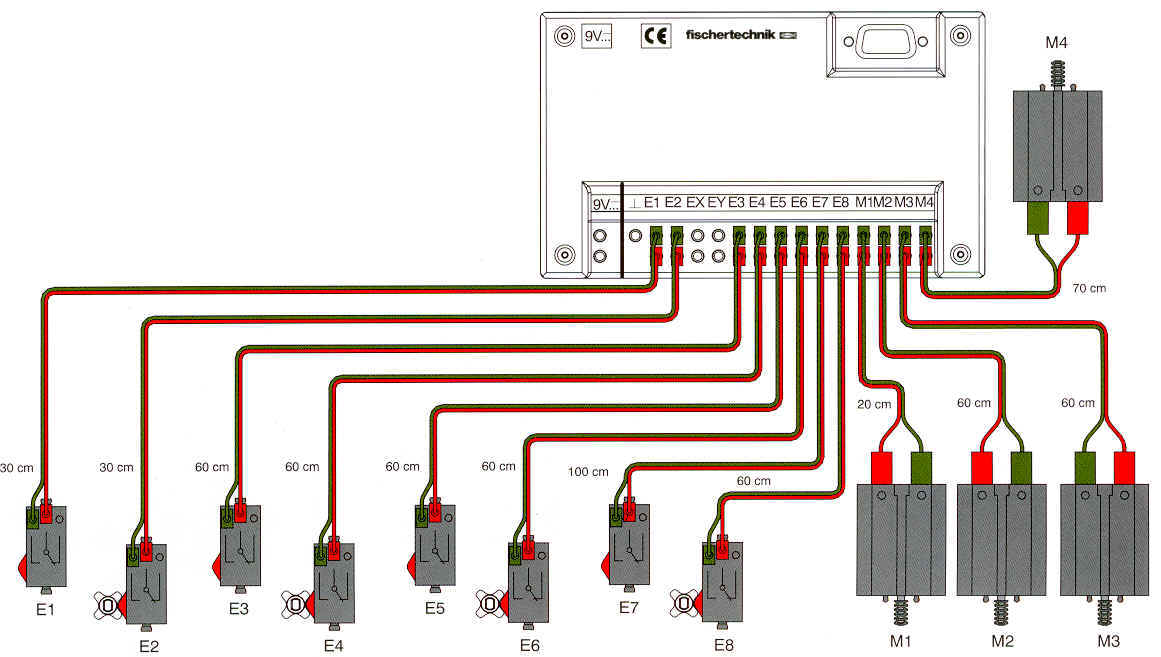
Un ejemplo del conexionado de los actuadores y sensores a la interfase se muestra en la siguiente figura. En este ejemplo cuatro motores están conectados a las salidas digitales y ocho pulsadores a las entradas digitales. De estos ocho, cuatro se utilizan como finales de carrera (E1, E3, E5, E7) y los otros cuatro (E2, E4, E6, E8) se utilizan como contadores de impulsos (golpeados por una rueda dentada de 4 dientes conforme giran los motores) que sirven para llevar la cuenta de la posición actual del robot - el conjunto motor de c.c. más contador de impulsos actúa como un motor paso a paso-. Este montaje se utiliza en un brazo de robot manipulador articulado de tres grados de libertad finalizado en una pinza.
Las entradas/salidas de la interfaz inteligente se pueden monitorizar/controlar directamente mediante la herramienta Diagnóstico de interfaz que se instala conjuntamente con LLWin. Las entradas digitales E1-E8 muestran su estado 0 o 1 (inactivo/activo). Las salidas M1-M4 se pueden desactivar (desconectar), polarizar de forma directa (derecha, giro horario -clockwise- en el caso de un motor) o de forma inversa (izquierda, giro antihorario -counter clockwise- en el caso de un motor). El valor de las dos entradas analógicas EX y EY se muestra en sendos "vúmetros" con un fondo de escala de 1024 unidades.
![]()
![]()
![]()
2004 Víctor R. González