Por sus especiales características, el sector nuclear es uno de los más susceptibles de utilizar robots de diseño especifico. Entre las diversas aplicaciones se han escogido aquí, por su especial relevancia, las relativas a las operaciones de mantenimiento en zonas contaminadas y de manipulación de residuos.
Las operaciones de inspección y mantenimiento de las zonas más contaminadas
de una central nuclear de producción de energía eléctrica son, por su
naturaleza, largas y costosas.
De realizarlas manualmente, el tiempo de exposición de los operadores a la
radiación es un factor crítico que, junto con el elevado coste que supone una
interrupción temporal del funcionamiento del sistema en cuestión, justifica
sin lugar a dudas la utilización de sistemas robotizados, normalmente
teleoperados, total o parcialmente, que sustituyan al operador.
En el generador de vapor se produce el intercambio de calor entre el fluido
primario y secundario. Para ello, dentro de la vasija del generador, se
encuentran dispuestas en forma matricial los tubos por los que circula el fluido
receptor del calor.
El inevitable desgaste de estos tubos obliga a realizar periódicamente labores
de inspección, para que en el caso de que alguno se encuentre dañado
inutilizarlo, poniendo en funcionamiento alguno de los tubos de reserva que a
tal fin se han dispuesto en el generador.
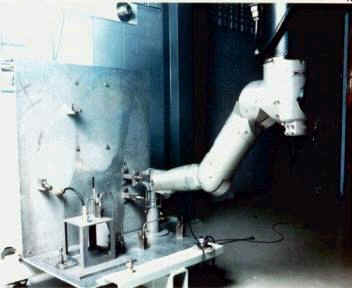
Para realizar esta labor de manera automática puede utilizarse un robot de
desarrollo específico que, introducido en la vasija, posicione una sonda de
inspección en la boca de cada tubo. Ésta, empujada por el interior del tubo,
proporcionará información sobre el estado mismo.
Es preciso considerar que el robot se introduce en la vasija mediante un sistema
mecánico que, junto con los posibles errores en la disposición matricial de
los tubos, obliga a que el robot trabaje, bien con ayuda de tele-operación, o
bien con sistemas sensoriales externos como visión láser, que proporcionen la
posición real relativa entre el extremo del robot y los tubos.
La industria nuclear genera una cantidad considerable de residuos radiactivos de baja contaminación (vestimentas, envases de plástico, papel,
etc.) o de alta contaminación (restos de las células del reactor, materiales
en contacto directo prolongado con las zonas radiactivas, etc.). La forma tamaño
y peso de estos desechos es variable y su manipulación tiene por objeto final
su envase de contenedores especiales, que son posteriormente transportados y
almacenados (lo que origina una nueva problemática).
Para manipular remotamente estos residuos se hace uso tanto de manipuladores con
unión mecánica y seguimiento directo del proceso por parte del operador a través
de un cristal (en caso de baja contaminación), como con sistemas con mando
remoto por radio o cable en el caso de contaminación elevada. Estos
manipuladores permiten la flexibilidad necesaria para manipular elementos de
peso variable y forma no definida.
Además, es preciso considerara la importancia que tiene la optimización del
espacio ocupado por los residuos en su almacenamiento, por lo que antes de su
envasado en los contenedores puede ser preciso fragmentarlos.
El NEATER 660 es un miembro de la familia de Tecnología de AEA de tele-robots nucleares diseñados específicamente para aplicaciones nucleares. El conjunto NEATER consta de varios tele-robots que pueden seleccionarse para reunir los requisitos específicos de cada aplicación. La configuración de los brazos y del controlador pueden adaptarse para reunir los requisitos necesarios.

El NEATER 660 está provisto con un sistema de mando de usuario amigable que incorpora las opciones, como las palancas de mando de fuerza y los despliegues del mismo.
|
EL Brazo |
N660 |
|
Carga útil: |
|
|
Brazo normal |
15Kg |
|
Brazo de Alcance largo |
10Kg |
|
El Modo de Teleoperador |
25Kg |
|
Alcance con herramientas: |
|
|
Brazo normal |
1.375m |
|
El Desplazamiento de la carga útil: |
|
|
De J5 / De J6 |
200mm / 100mm |
|
Repetibilidad |
±0.1mm |
|
El Rango del eje / Velocidad |
|
|
El
hombro Rueda (J1) |
340º/60° sec-1 |
|
Máx. Velocidad Lineal |
1.0m / el sec |
|
Tele-operación: |
|
|
Máx. Fuerza Continua (el Brazo) |
500N |
|
|
|
|
Controlador |
MV™ ADEPT |
|
Servomotores |
CA DE escobillas |
|
El Modo de Servo |
Velocidad o Torque |
|
Programando |
( VAL II™ Tipo) |
|
Enseñar y Repetir |
Enseña la rutina de repetición. |
|
Tele-operación: Opciones (con la retroalimentación de fuerza) |
La
Palanca de mando gemela |
|
|
|
|
El Ambiente operativo |
|
|
La temperatura: |
0 a 50°C |
|
La humedad: |
No – considerada |
|
La radiación: |
1MGy |
|
Montado: |
En suelo / en Techo |
![]()
![]()
![]()
2002-03 Víctor R. González