
![]()
Los robots de servicio se pueden definir como:
Dispositivos electromecánicos móviles o estacionarios, dotados normalmente de uno o varios brazos mecánicos independientes, controlados por un programa ordenador y que realizan tareas no industriales de servicio.
En esta definición entrarían, entre otros, los robots dedicados a cuidados médicos, educación, domésticos, uso en oficinas, intervención en ambientes peligrosos, aplicaciones espaciales, aplicaciones submarinas y agricultura. Sin embargo, esta definición de robots de servicio excluye los tele-manipuladores, pues estos no se mueven mediante el control de un programa ordenador, sino que están controlados directamente por el operador humano.
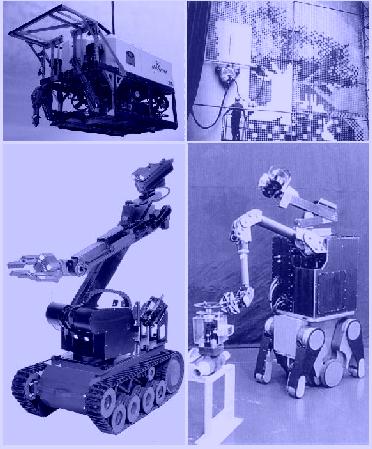
Ejemplos de robots de servicio: robots subacuáticos; robots escaladores; robots
contra incendios y bombas; robots para manejo de material nuclear
Ejemplos de robots de servicio: robots aspiradora para uso doméstico:

Ejemplo de robots de servicio: robots quirúrgicos y de asistencia quirúrgica;
robots para personas discapacitadas

Los robots teleoperados son definidos por la NASA como:
Dispositivos robóticos con brazos manipuladores y sensores con cierto grado de movilidad, controlados remotamente por un operador humano de manera directa, o mediante un ordenador.
Telerobots
En el diseño de Telerobots se desarrollan y aplican las tecnologías para el funcionamiento dirigido de telerobots en el espacio y en las aplicaciones terrestres. El telerobot dirigido, operando en un sitio, utiliza dispositivos de entrada, como la visualización gráfica, planeando las ayudas para ordenar la ejecución de una tarea a un sitio remoto usando un sistema telerobótico. Las áreas actuales de investigación y desarrollo incluyen:
El manipulador y el mando del robot móvil.
Las arquitecturas del telerobot remotas.
Procesado, integración, y fusión, del sistema sensorial.
Tareas interactivas que planea y ejecuta.
La visualización gráfica de las imágenes sobrepuestas.
Multisensor - el mando equilibrado.
Micromecanismos - control para el despliegue de los instrumentos.




Desde la izquierda: (1) Vista del laboratorio de Telerobots dirigido; (2) Un "brazo de serpiente" utilizado para el acceso diestro durante una inspección; (3) Un extremo de un sensor-actuador integrado (ISEE) utilizado en el robot Sojouner para la inspección del planeta marte; (4) prototipo del Rocky7, el Vagabundo de Marte, probando su brazo desplegado; (5) y (6) Robots que ayudan a un sistema de microcirugía.
![]()
![]()
![]()
2002-03 Víctor R. González