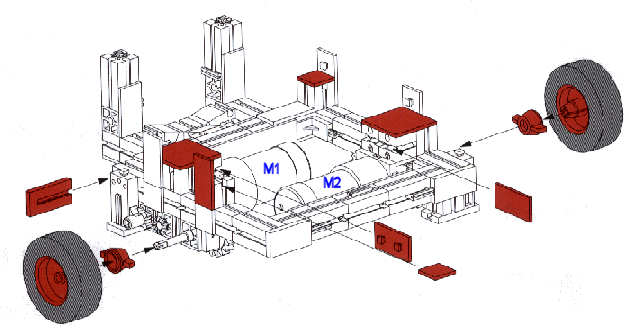
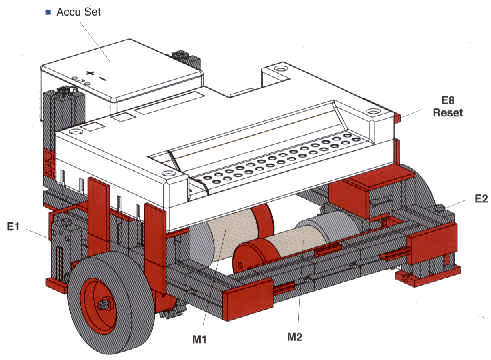
En el tema 5.5 fueron introducidos los conceptos fundamentales relativos a la robótica móvil. En particular, se expuso que en algunos robots sencillos el sistema de locomoción consistía simplemente en dos ruedas motrices con tracción independiente, es decir, cada una impulsada por su propio motor. Pues bien, éste es precisamente el sistema que utilizan los modelos del conjunto Mobile Robots II de fischertechnik. Sobre un chasis elemental se sujetan dos motores c.c. de potencia (M1 y M2) y al eje de estos se acoplan sendas ruedas mediante un reductor 1:2. Los motores utilizados ahora son distintos a los minimotores con tornillo sinfín en el eje manejados en los montajes anteriores, incorporan un reductor de velocidad 1:50 y proporcionan momentos de torsión mucho mayores que los minimotores.
Un bloque trasero con dos ruedecillas conducidas, que gira libremente en torno a un eje vertical, permite la marcha equilibrada del móvil y evita el volcado.
Este sencillo sistema permite realizar, obviamente, desplazamientos en línea recta, pero también giros, sin más que detener una de las dos ruedas mientras que la otra permanece en movimiento, o haciendo girar las ruedas en sentidos opuestos. El punto medio entre ambos motores es entonces el centro de giro del robot y las ruedas del robot se mueven sobre una circunferencia cuyo diámetro es la distancia entre las ruedas. Dos micropulsadores, E1 y E2, actúan como contadores de impulsos asociados a dichos motores, lo que permite medir desplazamientos con cierta precisión.
En esta imagen el chasis del robot se halla "boca abajo" Si se utiliza un programa que ponga en marcha el robot en línea recta durante 50 impulsos sobre un suelo liso pero adherente, y en condiciones de alimentación eléctrica de la interfaz normales:
se puede comprobar que recorre aproximadamente 50 cm, de modo que en promedio el robot recorre 1 cm de trayectoria por cada impulso contado (claro que esto depende en cierta medida de la textura de la superficie sobre la que se desplaza). El siguiente fragmento de programa hace girar el robot hacia la izquierda durante 50 impulsos del motor, como resultado de activar el motor derecho marcha adelante y el izquierdo marcha atrás:
Como la separación entre las ruedas es de aproximadamente 18.5 cm, la circunferencia que describen en el giro tiene un perímetro de 18.5 p = 58 cm. Como cada impulso equivale a 1 cm de desplazamiento, podemos ver que 360º equivalen aproximadamente a 58 impulsos (podríamos, incluso, redondear a 60 impulsos). Entonces, los 50 impulsos que el programa ha ordenado al robot le habrán hecho girar aproximadamente 310º. Puesto que un robot móvil debe ser un sistema autónomo, éste debe acarrear en su desplazamiento tanto a la interfaz de control que gobierna sus movimientos como al sistema de alimentación eléctrica portátil (batería) que alimenta a la propia interfaz, a los sensores y a los motores. Así pues, en la parte superior delantera del chasis se sitúa la interfaz y en la parte superior trasera, la batería recargable (denominada Accu Set).
La batería debe ser cargada con la red eléctrica durante al menos un par de horas si se requiere un tiempo importante de autonomía del móvil. Un programa desarrollado para un robot móvil debe ser
descargado necesariamente a la memoria de la interfaz, puesto que el robot
no se debe ver impedido en sus movimientos por el cable de conexión al PC.
Recuerda que, como se explicó en el tema 6.2, para
descargar un programa a la interfaz se debe utilizar la función
Download
Si el programa que se acaba de descargar a la interfaz comienza de inmediato a activar los sensores y actuadores del robot, podría suponer un problema dependiendo de donde se hallara situado el robot en el momento de la descarga. Por otra parte, es necesario contar con tiempo suficiente para retirar el cable de conexión antes de que el robot comience a ejecutar movimientos. Así, resulta necesario introducir una especie de "interruptor general" que no permita comenzar la ejecución del programa hasta que dicho interruptor se halle activado y que también permite repetir la ejecución del programa una vez finalizado. Por ello, se puede añadir un micropulsador (en la entrada E8 de la interfaz) que actúe como botón de parada/puesta en marcha y reset del sistema.
Mientras el pulsador E8 se encuentre activo el sistema se encontrará en reset, permaneciendo desactivadas todas las salidas y, por tanto, el sistema detenido. En cuanto E8 deje de estar activo comenzará la secuencia de ejecución y, cada vez que se vuelva a activar y desactivar, el programa se reiniciará. Fuentes
|