![]()
La historia de la tecnología está formada por tres períodos principales: era agrícola, era industrial y era de la información. El desarrollo de los robots se puede ver como lógica e importante parte de la historia.
Eras Agrícola e Industrial |
A través de la historia la tecnología de cada época ha sido poderosamente influyente en la vida cotidiana de sus sociedades. Los productos y la ocupación han sido dictados por la tecnología disponible, por ejemplo en la era agrícola cuya tecnología era muy primitiva, esta estaba formada por herramientas muy simples que, sin embargo eran lo último en tecnología, como consecuencia de ello la mayoría de la gente eran agricultores y todo el trabajo se hacía mediante la fuerza de los hombres y de los animales.
- Herón de Alejandría (85 d. C.) (fuente de pájaros cantores)

Arabia Utilidad práctica de mecanismos
Edad Media
– Hombre de hierro de Alberto Magno (1204- 1282)
– Gallo de Estrasburgo (1352)

Renacimiento
– León Mecánico de Leonardo da Vinci (1499)
– Hombre de Palo de Juanelo Turriano (1525)
Siglos XVII- XIX
– Muñecos (flautista) de Jacques Vaucanson (1738)
– Escriba, organista, dibujante de familia Droz (1770)
– Muñeca dibujante de Henry Maillardet
A mediados del siglo XVIII, los molinos de agua, la máquina de vapor y otros transformadores de energía reemplazaron la fuerza humana y animal como fuente principal de energía. Las nuevas máquinas de fabricación impulsaron el crecimiento de la industria y mucha gente pasó a estar empleada en las nuevas fábricas como trabajadores. Los bienes se producían más rápidamente y mejor que antes y la calidad de vida aumentó. Los cambios se sucedieron tan deprisa que a este período se le conoce como "Revolución Industrial".
Era de la Información |
A continuación, en la mitad del siglo XX surgen las industrias basadas en la ciencia, las mejoras tecnológicas en la electrónica hicieron posible el ordenador. Este constituye el desarrollo más importante, el ordenador revolucionó el modo de procesar y comunicar la información. Como resultado la información se ha convertido en un bien más del mercado y esta nueva era se conoce como la era de la información o "post-industrial".
La tecnología de la información tiene un gran impacto en la sociedad, ordenadores, fibra óptica, radio, televisión y satélites de comunicación son sólo ejemplos de dispositivos que tienen un enorme efecto sobre nuestra vida y economía.
Un gran porcentaje de empleos requieren "trabajadores informáticos" y cada vez menos se necesitan "trabajadores de producción". La tecnología de la información ha sido responsable del espectacular crecimiento de la Robótica, y a medida que la era industrial declina se espera que cada vez más trabajo físico sea realizado por robots.
![]()
![]()
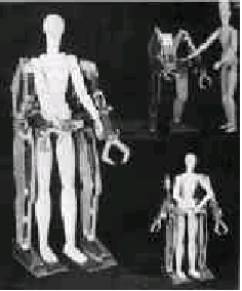
Androides que posean una funcionalidad completa se encuentran muy alejados de la actualidad debido a la multitud de problemas que aún deben ser resueltos. Sin embargo, algunos robots reales sofisticados que trabajan hoy en día están revolucionando los lugares de trabajo. Estos robots no tienen la romántica apariencia humana de los androides, de hecho son manipuladores (brazos y manos) industriales controlados por ordenador; son tan diferentes a la imagen popular que sería muy fácil no reconocerlos.
Con el objetivo de diseñar una maquina flexible, adaptable al entorno y de fácil manejo, George Devol, pionero de la Robótica Industrial, patentó en 1948, un manipulador programable que fue el germen del robot industrial. En 1948 R.C. Goertz del Argonne National Laboratory, desarrolló, con el objetivo de manipular elementos radioactivos sin riesgo para el operador, el primer tele manipulador. Éste consistía en un dispositivo mecánico maestro-esclavo. El manipulador maestro, reproducía fielmente los movimientos de este. El operador además de poder observar a través de un grueso cristal el resultado de sus acciones, sentía a través del dispositivo maestro, las fuerzas que el esclavo ejercía sobre el entorno.

Telemanipuladores
de Goertz. Argonne National
Laboratory (1948)
Años mas tarde, en 1954, Goertz hizo uso de la tecnología electrónica y del servocontrol sustituyendo la transmisión mecánica por eléctrica y desarrollando así el primer tele manipulador con servocontrol bilateral. Otro de los pioneros de la tele manipulación fue Ralph Mosher, ingeniero de la General Electric que en 1958 desarrollo un dispositivo denominado Handy-Man, consistente en dos brazos mecánicos teleoperados mediante un maestro del tipo denominado exoesqueleto. Junto a la industria nuclear, a lo largo de los años sesenta la industria submarina comenzó a interesarse por el uso de los tele manipuladores.
A este interés se sumó la industria espacial en los años setenta. La evolución de los tele manipuladores a lo largo de los últimos años no ha sido tan espectacular como la de los robots. Recluidos en un mercado selecto y limitado (industria nuclear, militar, espacial, etc.) son en general desconocidos y comparativamente poco atendidos por los investiga- dores y usuarios de robots. Por su propia concepción, un tele manipulador precisa el mando continuo de un operador, y salvo por las aportaciones incorporadas con el concepto del control supervisado y la mejora de la tele presencia promovida hoy día por la realidad virtual, sus capacidades no han variado mucho respecto a las de sus orígenes.
La sustitución del operador por un programa de ordenador que controlase los movimientos del manipulador dio paso al concepto de robot. La primera patente de un dispositivo robótico fue solicitada en marzo de 1954 por el inventor británico C.W. Kenward. Dicha patente fue emitida en el Reino Unido en 1957, sin embargo fue Geoge C. Devol, ingeniero norteamericano, inventor y autor de varias patentes, el que estableció las bases del robot industrial moderno. En 1954 Devol concibió la idea de un dispositivo de transferencia de artículos programada que se patentó en Estados Unidos en 1961.
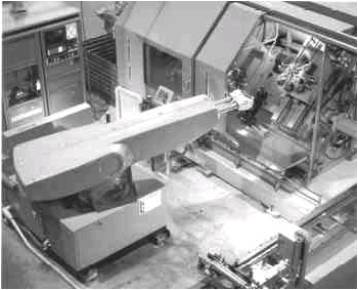
En 1956 Joseph F. Engelberger es director de ingeniería de la división aeroespacial de la empresa Manning Maxwell y Moore en Stanford, Conneticut. Juntos Devol y Engelberger comenzaron a trabajar en la utilización industrial de sus máquinas, fundando la Consolidated Controls Corporation, que más tarde se convierte en Unimation (Universal Automation), e instalando su primera máquina Unimate (1960), en la fábrica de General Motors de Trenton, Nueva Jersey, en una aplicación de fundición por inyección. Devol predijo que el robot industrial "ayudaría al trabajador de las fábricas del mismo modo en que las máquinas de ofimática habían ayudado al oficinista". Se produjo un boom de la idea de la fábrica del futuro, aunque en un primer intento el resultado y la viabilidad económica fueron desastrosos.
Devol-
Engelberger fundan Unimation (1956). Primer robot industrial
Handy-man
de Mosher (General Electric 1958)
Otras grandes empresas como AMF, emprendieron la construcción de maquinas similares (Versatran- 1963).
En 1968 J.F. Engelberger visitó Japón y poco más tarde se firmaron acuerdos
con Kawasaki para la construcción de robots tipo Unimate. El crecimiento de la
robótica en Japón aventaja en breve a los Estados Unidos gracias a Nissan, que
formó la primera asociación robótica del mundo, la Asociación de Robótica
industrial de Japón (JIRA) en 1972. Dos años más tarde se formó el Instituto
de Robótica de América (RIA), que en 1984 cambió su nombre por el de Asociación
de Industrias Robóticas, manteniendo las mismas siglas (RIA).
Por su parte Europa tuvo un despertar más tardío. En 1973 la firma sueca ASEA
construyó el primer robot con accionamiento totalmente eléctrico. En 1980 se
fundó la Federación Internacional de Robótica con sede en Estocolmo, Suecia.

Primer
robot con accionamiento eléctrico: IRb6 ASEA (1973)
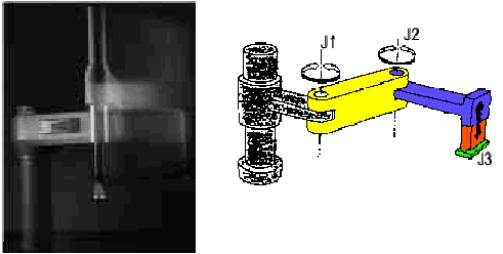
La configuración de los primeros robots respondía a las denominadas configuraciones esférica y antropomórfica, de uso especialmente válido para la manipulación. En 1982, el profesor Makino de la Universidad Yamanashi de Japón, desarrolla el concepto de robot SCARA (Selective Compliance Assembly Robot Arm) que busca un robot con un número reducido en grados de libertad (3 o 4), un coste limitado y una configuración orientada al ensamblado de piezas.
Robot
SCARA del Prof. Makino (Univ. Yamanashi
de Japón- 1982)

La definición del robot industrial, como una máquina que puede efectuar un
número diverso de trabajos, automáticamente, mediante la programación previa,
no es válida, puesto que existen bastantes máquinas de control numérico que
cumplen esos requisitos. Una peculiaridad de los robots es su estructura de
brazo mecánico y otra su adaptabilidad a diferentes aprehensores o
herramientas. Otra característica especifica del robot, es la posibilidad de
llevar a cabo trabajos completamente diferentes e, incluso, tomar decisiones según
la información procedente del mundo exterior, mediante el adecuado programa
operativo en su sistema informático.
Se pueden distinguir cinco fases relevantes en el desarrollo de la Robótica
Industrial:
En esta fase que dura desde 1975 hasta 1980, la conjunción de los efectos de la revolución de la Microelectrónica y la revitalización de las empresas automovilísticas, produjo un crecimiento acumulativo del parque de robots, cercano al 25%.
La evolución de los robots industriales desde sus principios ha sido vertiginosa. En poco mas de 30 años las investigaciones y desarrollos sobre robótica industrial han permitido que los robots tomen posiciones en casi todas las áreas productivas y tipos de industria. En pequeñas o grandes fabricas, los robots pueden sustituir al hombre en aquellas áreas repetitivas y hostiles, adaptándose inmediatamente a los cambios de producción solicitados por la demanda variable.
Desde 1980, los robots se han expandido por varios tipo de industrias. El principal factor responsable de este crecimiento han sido las mejoras técnicas en los robots debidas al avance en Microelectrónica e Informática. Los Estados Unidos vendieron sus empresas de robots a Europa y Japón o a sus filiales en otros países. En la actualidad sólo una empresa, Adept, permanece en el mercado de producción industrial de robots en EE.UU.
Aunque los robots ocasionen cierto desempleo, también crean puestos de trabajo: Técnicos, comerciales, ingenieros, programadores, etc. Los países que usen eficazmente los robots en sus industrias tendrán una ventaja económica en el mercado mundial.
En el campo de la investigación el primer autómata (1940,s) lo construye Grey Walter, era una tortuga que buscaba la luz o iba a enchufarse para recargar baterías, también de esa época es la bestia de John Hopkins. Al final de los 60,s Shakey construido por SRI navegaba en entornos de interior de edificios muy estructurados, y al final de los 70,s el Stanford Cart de Moravec se atrevió a salir a ‘exteriores’. A partir de ese momento ha habido una gran proliferación de trabajo en vehículos autónomos que ya circulan a la velocidad de un coche por la carretera y navegan por todo terreno en aplicaciones comerciales.
![]()
![]()
La introducción de los microprocesadores desde los años 70 ha hecho posible que la tecnología de los robots haya sufrido grandes avances, los modernos ordenadores han ofrecido un "cerebro" a los músculos de los robots mecánicos. Ha sido esta fusión de electrónica y mecánica la que ha hecho posible al moderno robot, los japoneses han acuñado el término "mecatrónica" para describir esta fusión.
El año 1980 fue llamado "primer año de la era robótica" porque la producción de robots industriales aumentó ese año un 80 % respecto del año anterior.
|
|
Primera y Segunda Generación |
Los cambios en Robótica se suceden tan deprisa que ya se ha pasado de unos robots relativamente primitivos a principios de los 70, a una segunda generación. La primera generación de robots era reprogramable, de tipo brazo, dispositivos manipuladores que sólo podían memorizar movimientos repetitivos, asistidos por sensores internos que les ayudan a realizar sus movimientos con precisión. La segunda generación de robots entra en escena a finales de los 70, tienen sensores externos (tacto y visión por lo general) que dan al robot información (realimentación) del mundo exterior. Estos robots pueden hacer elecciones limitadas o tomar decisiones y reaccionar ante el entorno de trabajo, se les conoce como robots adaptativos.
|
|
Tercera Generación |
La tercera generación acaba de surgir, está surgiendo en estos años, emplean la inteligencia artificial y hacen uso de los ordenadores tan avanzados de los que se puede disponer en la actualidad. Estos ordenadores no sólo trabajan con números, sino que también trabajan con los propios programas, hacen razonamientos lógicos y aprenden. La IA permite a los ordenadores resolver problema inteligentemente e interpretar información compleja procedente de avanzados sensores.
|
|
Tendencias futuras |
Durante años los robots han sido considerados útiles sólo si se empleaban como manipuladores industriales. Recientemente han irrumpido varios roles nuevos para los robots. A diferencia de los tradicionales robots fijos de manipulación y fabricación, estos nuevos robots móviles pueden realizar tareas en un gran número de entornos distintos. A estos robots no industriales se les conoce como robots de servicio.
Los robots de servicio proporcionan muchas funciones de utilidad, se emplean para el ocio, la educación, fines de bienestar personal y social. Por ejemplo, hay prototipos que recorren los pasillos de los hospitales y cárceles para servir alimentos, otros navegan en oficinas para repartir el correo a los empleados. Los robots de servicios son idealmente adecuados al trabajo en áreas demasiado peligrosas para la vida humana y a explorar lugares anteriormente prohibidos a los seres humanos. Han probado ser valiosos en situaciones de alto riesgo como en la desactivación de bombas y en entornos contaminados radioactiva y químicamente.
Este crecimiento revolucionario en el empleo de robots como dispositivos prácticos es un indicador de que los robots desempeñarán un importante papel en el futuro. Los robots del futuro podrán relevar al hombre en múltiples tipos de trabajo físico. Joseph Engelberg, padre de la robótica industrial, está investigando en una especie de robot mayordomo o sirviente doméstico. Se piensa que los robots están en ese momento crítico antes de la explosión del mercado, como lo estuvieron los PC,s en 1975. El campo de la robótica se desbordará cuando los robots sean de dominio público, esta revolución exigirá que la gente de la era de la información no sea "analfabeta robótica".
En palabras de Engelberg:"Robotics is a six billion dollars industry worldwide. ... Sometime between 2000 and 2010 service robots will exceed industrial robotics in worldwide sales volume." Transition Research Corporation, USA.
![]()
![]()
El mercado mundial |
Las ventas mundiales de robots industriales alcanzaron un máximo en 1990, con más de 81.000 unidades. Siguió un retroceso entre 1991 y 1993; las ventas mundiales cayeron a aproximadamente 54.000 unidades en 1993. El mercado del robot mundial empezó entonces un período de recuperación que alcanzó el máximo en 1997, con un nivel de 85.000 unidades. En 1998, sin embargo, las ventas bajaron más de un 16%, cayendo a 71,000 unidades (véanse la tabla figura adjuntas).
Instalaciones anuales de robots industriales en 1997 y 1998, y proyecciones para 1999 y 2002 (número de unidades)
| País |
1997 |
1998 |
1999 |
2002 |
% cambio 98/97 |
|
Japón |
42,696 |
33,796 |
33,800 |
43,000 |
-20.8 |
|
Estados Unidos |
12,459 |
10,857 |
11,700 |
15,573 |
-12.9 |
|
Alemania |
9,017 |
9,938 |
10,500 |
13,000 |
10.2 |
|
Italia |
3,692 |
4,381 |
4,950 |
6,750 |
18.7 |
|
Francia |
1,721 |
1,653 |
1,950 |
2,650 |
-4 |
|
Reino Unido |
1,792 |
1,282 |
1,800 |
2,000 |
-28.5 |
|
Los seis Grandes |
71,377 |
61,907 |
64,700 |
82,973 |
-13.3 |
|
Austria |
250 |
250 |
|
|
|
|
Bélgica |
906 |
959 |
|
|
5.9 |
|
Dinamarca |
130 |
215 |
|
|
65.4 |
|
Finlandia |
220 |
378 |
|
|
71.8 |
|
Noruega |
67 |
63 |
|
|
-6 |
|
España |
1,203 |
1,810 |
|
|
50.5 |
|
Suecia |
617 |
691 |
|
|
12 |
|
Suiza |
289 |
357 |
|
|
23.5 |
|
Oeste de Europa-8 |
3,682 |
4,723 |
5,400 |
7,200 |
28.3 |
|
Europa Oriental |
184 |
206 |
200 |
500 |
12 |
|
Australia |
526 |
347 |
|
|
-34 |
|
Corea del sur |
5,759 |
1,431 |
|
|
-75.2 |
|
Singapur |
500 |
500 |
|
|
|
|
Taiwán, la Provincia de China, |
753 |
759 |
|
|
0.8 |
|
Asia-4 |
7,538 |
3,037 |
3,000 |
4,000 |
-59.7 |
|
Antigua URSS |
1,000 |
500 |
1,000 |
1,000 |
-50 |
|
Otros países |
1,300 |
800 |
800 |
1,200 |
-38.5 |
|
Total |
85,081 |
71,173 |
75,100 |
96,873 |
-16.3 |
|
Fuentes: ONU / ECE, IFR |
|||||
Instalaciones anuales de robots industriales en 1993-1998, y proyecciones 1999-2002
El gran retroceso en las ventas entre 1990 y 1993/1994 era principalmente debido a la baja del suministro de robots de Japón, de 60.000 unidades a 30.000 unidades en 1994. La bajada de 1998 era resultado de la caída de ventas no sólo en Japón, sino también en la República de Corea. Las ventas en estos dos países bajaron un 21% y un75%, respectivamente, comparado con el nivel de 1997 (tabla 1 y figura 1).
Cuando se excluye a Japón y la República de Corea, el mercado mundial restante muestra un aumento impresionante, del 16%, en 1998, en comparación con 1997. Esta saludable proporción de crecimiento también puede verse en proporciones de crecimiento del 21% en 1996 y del 35% en 1997 (la tasa de crecimiento correspondiente para el mercado mundial total era de sólo el 11% y el 7%, respectivamente).
Después de tres años de proporciones de crecimiento anuales del orden del 30%, el mercado en Estados Unidos cayó un 5% en 1996. En 1997, el mercado estaba recuperándose de nuevo, mostrándose un crecimiento de un 28% por encima de 1996, alcanzando un registro de 12.500 unidades. En 1998, sin embargo, las ventas cayeron un 13% por lo que se refiere a las unidades y un 7% por lo que se refiere al valor. Esto probablemente fue sólo un retroceso temporal, puesto que el mercado americano subió un 9% en la primera mitad de 1999, comparado con 1998.
El mercado del robot
europeo aumentó un 10% en 1998, hasta aproximadamente las 22.000 unidades.
Existe un aumento en la primera mitad de 1999 de un 32% por encima del mismo
periodo de 1998, indicando que en1999 se vería una ola continuada de inversiones
en robots.
El crecimiento en
1998 estaba, sin embargo, bastante irregularmente distribuido entre los países. En
los 8 países de europea occidental, más pequeño, era del 28%. En España, Dinamarca y Finlandia, el crecimiento varió entre
el 50% y el 70%.
Entre los países más
grandes, Alemania registró un crecimiento del 10% e Italia del 19%. Las ventas de
Francia cayeron un 4% y un 29% en el Reino Unido.
Como se mencionó anteriormente, las ventas bajaron en Japón y la República de Corea. En Singapur, Tailandia y otros mercados asiáticos en los que existían condiciones previas favorables para la inversión en robótica han sufrido un paro, al menos, temporalmente. En Australia el mercado bajó un 34%.
En general, han aumentado las ventas anuales desde que los robots industriales empezaron a ser presentados a las industrias a finales de los años sesenta. Sin embargo, muchos de los primeros robots están ahora fuera de servicio. La cantidad de robots industriales en funcionamiento real es, por consiguiente, más baja. La IFR estima el número mundial de robots industriales operacionales al final de 1998 en 720.000 unidades, comparado con 700.000 unidades al final de 1997, lo que representa un aumento del 3%.
Japón se considera que cuenta con más de la mitad de los robots operacionales del mundo. Su proporción, sin embargo, está disminuyendo continuamente. En 1998, la operación de robots en Japón se desplomó en número absoluto.
Previsiones |
El mercado mundial para los robots industriales se proyecta que aumente de 71.000 unidades en 1998 a 97.000 en 2002, o anualmente un promedio de un 8% (tabla 1 y figura 1). Estas proyecciones son revisando significativamente hacia abajo, como comparación a aquellos en el problema anterior. La Robótica mundial, principalmente debido al estancamiento proyectado en los mercados asiáticos.
| Número de ventas mundiales | Unidades operativas a nivel mundial |
| 1998: 71,000 unidades 2002: 97,000 unidades, +8% por año |
1998: 720,000 unidades 2002: 800,000 unidades, +2.7% por año |
Las ventas en Japón continúan estando flojas pero se proyecta un crecimiento firme en Europa y América del Norte. Así, el número total de robots operativos continúa mostrando un aumento firme.
Número estimado de robots operativos en los años 1990, 1994 y 1998, y proyecciones para 2002
|
País |
1990 |
1994 |
1998 |
2002 |
% cambio 98/97 |
|
Japón |
274,200 |
377,000 |
411,800 |
366,600 |
-0.3 |
|
Estados Unidos |
39,000 |
57,100 |
81,700 |
120,200 |
6 |
|
Alemania |
27,300 |
45,300 |
73,200 |
103,800 |
9.5 |
|
Italia |
12,200 |
20,600 |
31,500 |
47,400 |
11 |
|
Francia |
8,400 |
12,300 |
16,200 |
20,000 |
3.7 |
|
Reino Unido |
5,900 |
8,100 |
10,800 |
15,000 |
8.1 |
|
Seis grandes |
367,000 |
520,500 |
625,200 |
673,000 |
2.3 |
|
Austria |
1,100 |
2,100 |
2,800 |
|
5.2 |
|
Bélgica |
2,300 |
4,500 |
7,200 |
|
11.2 |
|
Dinamarca |
500 |
600 |
1,000 |
|
20.5 |
|
Finlandia |
800 |
1,200 |
1,900 |
|
17.8 |
|
Noruega |
400 |
500 |
500 |
|
-2.1 |
|
España |
2,100 |
4,200 |
8,600 |
|
23.4 |
|
Suecia |
3,300 |
4,200 |
5,300 |
|
7.1 |
|
Suiza |
1,500 |
2,500 |
3,300 |
|
8.7 |
|
Europa occidental - Europa-8 |
12,200 |
19,700 |
30,700 |
48,700 |
13.2 |
|
Europa oriental |
7,500 |
2,600 |
2,700 |
4,100 |
-1.6 |
|
Australia |
1,400 |
1,800 |
2,600 |
|
8.2 |
|
Corea del sur |
3,000 |
12,700 |
31,400 |
|
4.1 |
|
Singapur |
1,400 |
2,300 |
5,000 |
|
7.6 |
|
Taiwán |
1,300 |
3,300 |
5,800 |
|
13.5 |
|
Asia-4 |
7,100 |
20,000 |
44,800 |
53,600 |
5.8 |
|
Antigua URSS |
64,200 |
20,000 |
10,000 |
10,000 |
|
|
Otros países |
1,400 |
3,400 |
7,000 |
10,000 |
10.7 |
|
Total |
459,400 |
586,100 |
720,400 |
799,400 |
3.0 |
|
Fuentes: ECE, IFR y asociaciones de robots nacionales |
|||||
|
|
La densidad de robots está aumentando |
La tabla adjunta muestra el número de robots por cada 10.000 personas empleadas en la industria. Pueden distinguirse cuatro grupos de países: el primer grupo contiene Japón, Singapur y la República de Corea, con densidades que van de aproximadamente 280 a 110. Estos números no son, sin embargo, comparables directamente a los de los otros países porque el último aplica una definición más estricta de robots.
Número de robots por cada 10,000 personas empleadas en la industria, en 1998
|
País |
1998 |
|
|
Japón |
279 |
|
|
Singapur |
140 |
|
|
Corea del sur |
109 |
|
|
Alemania |
100 |
|
|
Italia |
70 |
|
|
Suecia |
66 |
|
|
Finlandia |
48 |
|
|
Bélgica |
45 |
|
|
Estados Unidos |
44 |
|
|
Suiza |
42 |
|
|
Francia |
41 |
|
|
Austria |
40 |
|
|
España |
34 |
|
|
Australia |
23 |
|
|
Reino Unido |
21 |
|
|
Dinamarca |
20 |
|
|
Noruega |
15 |
|
|
Fuentes: ONU/ECE, IFR |
||
Entre países que aplican una definición más restrictiva de robots industriales, Alemania está a la cabeza con 100 robots por cada 10.000 personas empleadas, seguida por Italia y Suecia con 70. En el tercer grupo de países, las densidades varían entre 50 y 40.
La siguiente tabla se muestra otra medida de densidad de robots: el número de robots por cada 10.000 obreros de producción en la industria del vehículo de motor. Aquí los números son de 5 a 10 veces superiores a las densidades anteriores, basadas en todas las personas empleadas en la industria.
Numero de robots por 10,000 obreros en la industria de automoción, de 1993 a 1998
|
País |
1993 |
1998 |
|
|
Reino Unido |
175 |
308 |
|
|
Suecia |
317 |
452 |
|
|
Estados Unidos |
393 |
539 |
|
|
Alemania |
313 |
646 |
|
|
Italia |
458 |
705 |
|
|
Japón |
1,481 |
1,655 |
|
|
Fuentes: ONU/ECE, IFR. Nota: datos estimados para Japón |
|||
En Japón se estima que en 1998 había un robot industrial para cada 6 obreros de producción en la industria del automóvil. En Italia había 14 obreros por cada robot y 19 en los Estados Unidos.
Los precios nominales de robots están siguiendo una tendencia descendente. Además, al tener en cuenta las significativas mejoras en la actuación, los precios han caído más aún durante los años noventa. Esto implica que la rentabilidad de instalaciones de robots existentes está aumentando. A la larga (10-15 años) los precios parece que tendrán una tendencia a bajar.
Número de robots con 5 brazos o más, comparado con el número del total de robots instalado en 1998
|
País |
Todos los robots |
Los robots con >= 5 brazos |
% proporción |
|
Estados Unidos |
10,857 |
9,607 |
88.5 |
|
Alemania |
9,938 |
6,108 |
61.5 |
|
Italia |
4,381 |
2,516 |
57.4 |
|
España |
1,810 |
1,545 |
85.4 |
|
Francia |
1,653 |
1,057 |
63.9 |
|
Reino Unido |
1,282 |
871 |
67.9 |
|
Bélgica |
959 |
671 |
70.0 |
|
Suecia |
691 |
616 |
89.1 |
|
Australia |
347 |
283 |
81.6 |
|
Finlandia |
378 |
263 |
69.6 |
|
Dinamarca |
215 |
192 |
89.3 |
|
Austria |
250 |
130 |
52.0 |
|
Taiwán, |
759 |
108 |
14.2 |
|
Noruega |
63 |
56 |
88.9 |
|
Polonia |
53 |
40 |
75.5 |
|
Subtotal |
33,636 |
24,063 |
71.5 |
|
Japón |
33,796 |
|
|
|
Corea del sur |
1,431 |
|
|
|
Otros países |
2,310 |
|
|
|
Total |
71,173 |
||
|
Fuentes: ONU / ECE, IFR |
|||
Numero de robots de servicio para diversas áreas de aplicación, instalados al final de 1998 y estimados para el periodo 1999-2002.
|
Tipos de robots |
Al final de 1998 |
Instalaciones 1999-2002 |
|
robots
de limpieza: |
300 |
500 |
|
robots
de alcantarilla (limpieza, inspección) |
200 |
200 |
|
robots
subacuáticos: |
400 |
200 |
|
robots
domésticos |
2,000 |
12,500 |
|
robots
médicos |
800 |
7,000 |
|
Robots para personas discapacitadas; robots de asistencia; robots de silla de ruedas |
200 |
200 |
|
Robots de correo |
100 |
200 |
|
Robots de plataforma móvil (usos múltiples) |
400 |
200 |
|
Robots de inspección; robots de seguridad |
50 |
300 |
|
Robots guía (en museos) |
|
100 |
|
Robots de abastecimiento de gasolinas |
50 |
800 |
|
Robots contra bombas e incendios |
150 |
400 |
|
Robots
en la industria de la construcción |
350 |
1,000 |
|
Número total de unidades, excluyendo robots aspiradora |
5,000 |
23,600 |
|
Robots aspiradora |
|
450,000 |
|
Valor estimado en millones de $ US. |
600 |
3,300 |
![]()
![]()
![]()
2002-03 Víctor R. González