La interfaz de control -Intelligent Interface-
Para programar y controlar los modelos fischertechnik mediante un ordenador personal se precisa de una interfaz como elemento vinculador entre el modelo y el PC. Esta interfaz es denominada "Intelligent interface".
 |
 |
Cuenta con:
-
4 salidas digitales (M1 a M4) para el control de los actuadores
-
10 entradas para el control de los sensores: 8 son digitales (E1-E8) y dos son analógicas (EX, EY).
La conexión con el PC se realiza mediante un puerto serie RS-232 con conector SubD9 (9 pines).
Requiere una alimentación de c.c. de 9 V/1000 mA. Puede utilizarse una batería o un alimentador (con el polo + en el interior del casquillo).
Se pueden interconectar dos interfases para duplicar el número de actuadores (M1-M8) y de sensores (E1-E16).
El microprocesador constituye la central de control. Ejecuta las instrucciones memorizadas en la RAM (de 32 kByte) y en la EPROM (de 64 kByte).

Puede funcionar en modo "on-line" (en línea, gobernado en todo momento por el PC) o en modo "download". En este último modo el procesamiento del programa tiene lugar únicamente en el microprocesador de la interfase, desacoplado del PC. En una primera fase se escribe el programa de control en el PC, luego se descarga en la interfase y, finalmente, ésta puede cortar el contacto con el PC (de modo que el cable serie puede ser desconectado).
La forma natural de programar la interfase es el lenguaje LLWin, pero en modo "on-line" puede ser utilizada mediante cualquier lenguaje de programación. Los detalles acerca de este proceso se pueden encontrar en www.fischertechnik.de. En dicha página figuran algunos drivers diseñados para diferentes lenguajes de programación.
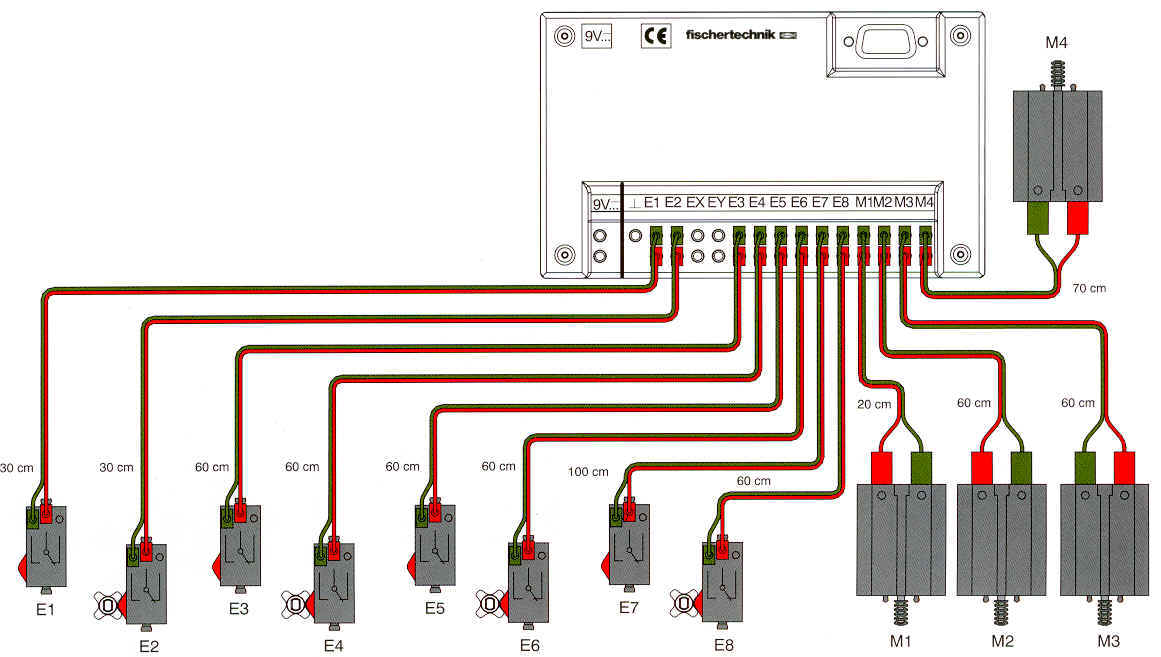
Un ejemplo del conexionado de los actuadores y sensores a la interfase se muestra en la siguiente figura. En este ejemplo cuatro motores están conectados a las salidas digitales y ocho pulsadores a las entradas digitales. De estos ocho, cuatro se utilizan como finales de carrera (E1, E3, E5, E7) y los otros cuatro (E2, E4, E6, E8) se utilizan como contadores de impulsos (golpeados por una rueda dentada de 4 dientes conforme giran los motores) que sirven para llevar la cuenta de la posición actual del robot - el conjunto motor de c.c. más contador de impulsos actúa como un motor paso a paso-. Este montaje se utiliza en un brazo de robot articulado de tres grados de libertad finalizado en una pinza.
Las entradas/salidas de la interfase inteligente se pueden monitorizar/controlar directamente mediante la herramienta "Check Interface" que se proporciona conjuntamente con LLWin. Las entradas digitales E1-E8 muestran su estado 0 o 1 (inactivo/activo). Las salidas M1-M4 se pueden desactivar (off), polarizar de forma directa (cw, giro horario -clockwise- en el caso de un motor) o de forma inversa (ccw, giro antihorario -counter clockwise- en el caso de un motor). El valor de las dos entradas analógicas EX y EY se muestran es sendos "vúmetros" con un fondo de escala de 999 unidades.
![]()
![]()
Los actuadores y los sensores
Los actuadores que pueden ser utilizados con los modelos de Industry Robots son:
-
electroimanes
-
lámparas
-
motores
 |
 |
 |
Los estados instantáneos de las salidas se guardan en unas
entradas digitales (virtuales) denominadas E31-E38 y E41-E48.
E31-E38 almacenan
el estado de giro antihorario de los motores M1-M8 y E41-E48 el estado de giro
horario. Se pueden consultar también estas últimas para determinar si las
lámparas y los electroimanes se hallan activados.
Los posibles sensores digitales son:
-
fototransistores
-
pulsadores
-
células Reed (sensores magnéticos)
 |
 |
 |
Los posibles estados de estas entradas son:
-
fototransistor: luz - oscuridad;
-
pulsador: presionado - no presionado;
-
contacto Reed: activado - no activado
Todos los anteriores dispositivos de entrada/salida son alimentados mediante el Intelligent Interface (a 9 V).
De los actuadores y sensores anteriores, en el producto Industry Robots tal como se adquiere directamente, sólo se incluyen 4 motores y 8 pulsadores. Si se necesitan, el resto han de adquirirse por separado.
![]()