Nos referiremos ahora a la interfaz de control intelligent interface de fischertechnik, cuyo esquema se muestra en la figura siguiente:
Sus características principales son, para el modelo 30402:
Las clavijas de las E/S son de 2 mm, proporcionadas en los diferente modelos de montaje de la línea fischertechnik computing, en particular, en los conjuntos de control programdo computing starter y en los conjuntos de robótica industry, pneumatic y mobile robots. En la siguiente figura se puede observar un diagrama de bloques de la composición interna de la interfaz:
Puede funcionar en dos modos:
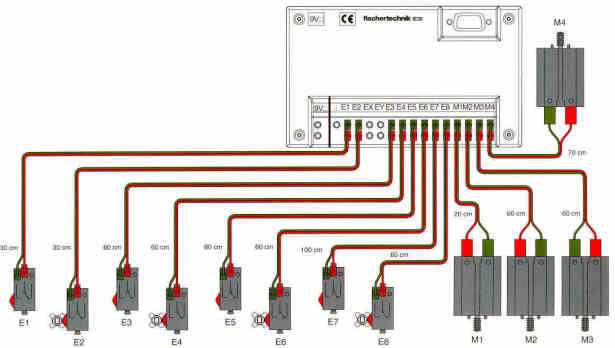
La forma natural de programar la interfaz es el lenguaje LLWin de fischertechnik, pero en modo "on-line" puede ser utilizada mediante cualquier lenguaje de programación. Los detalles acerca de este proceso se pueden encontrar en www.fischertechnik.de. En dicha página figuran algunos drivers diseñados para diferentes lenguajes de programación. Flowol soporta la programación de esta interfaz sin necesidad de instalar drivers adicionales. Sin embargo, si se utiliza Flowol con esta interfaz, no se dispone del modo descarga. Un ejemplo del conexionado de los actuadores y sensores propios de fischertechnik a la interfaz se muestra en la siguiente figura. En este ejemplo cuatro motores de un robot están conectados a las salidas digitales y ocho micropulsadores a las entradas digitales. De estos ocho, cuatro se utilizan como finales de carrera (E1, E3, E5, E7) y los otros cuatro (E2, E4, E6, E8) se utilizan como contadores de impulsos (golpeados por una rueda dentada de 4 dientes conforme giran los motores) que sirven para llevar la cuenta de la posición actual del robot - el conjunto motor de c.c. más contador de impulsos actúa como un motor paso a paso-. Este montaje se utiliza en un brazo de robot manipulador articulado de tres grados de libertad finalizado en una pinza.
Para finalizar este tema, algunos comentarios acerca del uso de esta interfaz en el aula-taller. Evidentemente la intelligent interface está diseñada específicamente para controlar los distintos dispositivos de control y robótica del fabricante fischertechnik. En particular, con los conjuntos Computing Starting y con los conjuntos de robótica industry, pneumatic y mobile robots. No obstante, un motor de c.c de entre 1.5 y 12 V como los utilizados en el aula-taller puede ser operado mediante la interfaz, aunque sus exigencias de corriente suelen ser mayores que las proporcionadas por la misma. De hecho, si se conecta este tipo de motor con cierta carga a la interfaz, se observa que el LED indicador de operación parpadea ligeramente en lugar de permanecer estable, lo que resulta indicativo de que el motor está exigiendo a la interfaz una corriente mayor que aquélla nominal para la que fue diseñada. Por otra parte, el tipo de conectores de 2 mm proporcionados por la interfaz no son excesivamente estándar en relación con los sensores y actuadores utilizados habitualmente en el aula-taller. No obstante esta interfaz resulta sumamente sencilla y "agradecida" de utilizar con los propios conjuntos de montaje de fischertechnik. Como conclusión final podemos indicar que resulta recomendable utilizar la interfaz FlowGo con los proyectos de diseño y elaboración propia de los alumnos en el aula-taller y la intelligent interface con los conjuntos de montaje rápido y de robótica propios de fischertechnik, que agilizan notablemente el estudio de los diferentes aspectos del control y la robótica en el aula.
|