En este anexo se recogen, para facilitar su consulta, las características principales de algunos de los modelos que pueden ser montados usando el conjunto Mobile Robots II, que serán utilizados en las actividades prácticas de esta unidad.
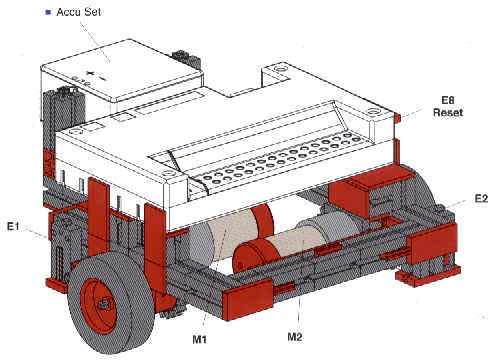
1. Robot móvil básico Este robot consta simplemente de un chasis que soporta la interfaz de control y la batería (Accu Set), provisto de un eje con dos ruedas de tracción independiente, cada una impulsada por un motor, M1 y M2. Dos micropulsadores, E1 y E2, actúan como contadores de impulsos asociados a dichos motores. Un micropulsador más, E8, actúa como interruptor de reset del sistema.
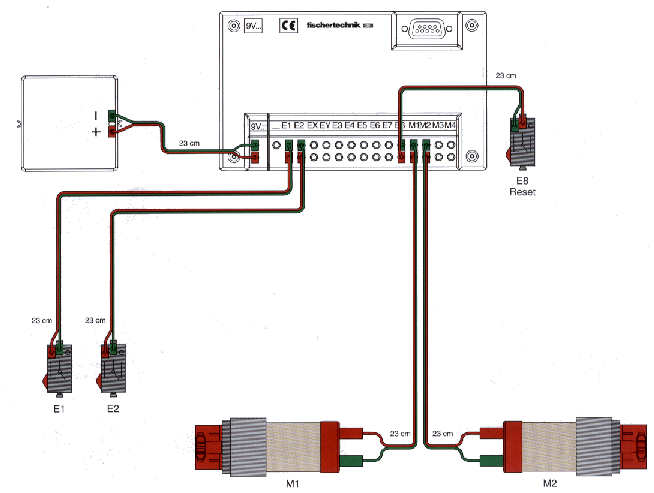
Como vemos, este robot sólo cuenta con sensores internos (E1 y E2), de forma que sólo será capaz de reaccionar pasivamente ante el entorno. El esquema eléctrico correspondiente es:
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II , páginas 4-9.
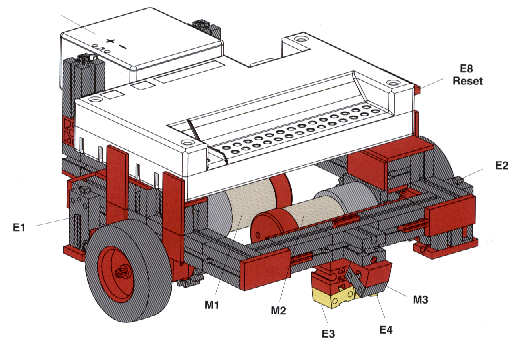
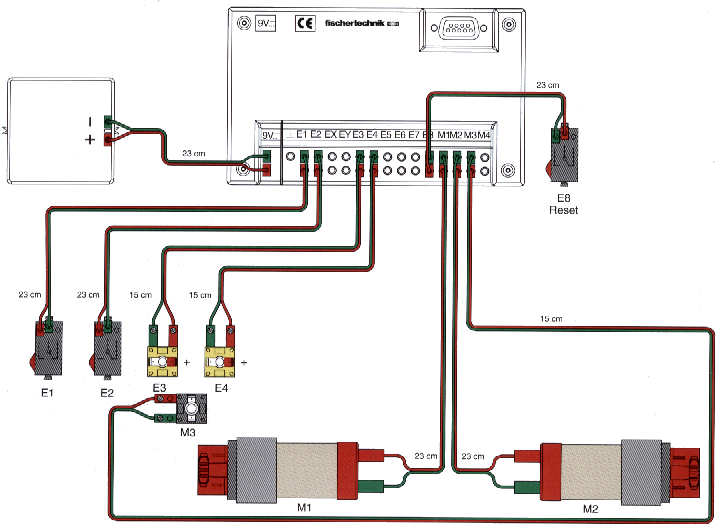
2. Robot rastreador Éste no supone más que una modificación del anterior consistente en añadir un sensor óptico de proximidad bajo el bastidor delantero del chasis, con objeto de poder detectar y seguir una pista estrecha y oscura que actúa como guía de un determinado camino sobre el terreno. El detector de proximidad está integrado por una lámpara lenticular (M3), que actúa como fuente de luz, y por dos fototransistores (E3 y E4) situados muy próximos entre sí y en el centro del bastidor. La luz originada por M3 será detectada por E3 y E4 si se produce suficiente reflexión en el terreno, es decir, si éste es suficientemente "claro", y no será detectada si el terreno es "oscuro". Este sistema es capaz de detectar una guía negra y estrecha "dibujada" sobre el terreno, de modo que con la adecuada programación el robot móvil se puede corregir la activación de los motores para rastrear una determinada pista continua. Así pues, este robot, al contrario que el precedente, puede reaccionar activamente ante el entorno debido a que cuenta con sensores externos.
El esquema eléctrico correspondiente es:
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II , páginas 24-25.
3. Robot de transporte de carga Análogamente, éste no supone más que una modificación del móvil anterior consistente en añadir una horquilla de transporte constituida por una plataforma elevable gracias a un nuevo motor (M4) cuyo reductor engrana en el mecanismo de cremallera de la horquilla. Dos micropulsadores (E5 y E6) actúan como finales de carrera inferior y superior de la misma.
El esquema eléctrico correspondiente es:
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Mobile Robots II , páginas 26-29. Fuentes
|