![]()
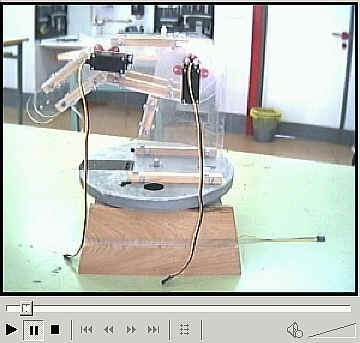
Se pretende construir un robot con estructura de brazo articulado, que imite la configuración de un robot manipulador industrial de 3 grados de libertad, y cuyo actuador final sea una pinza.
Aprovechando un giradiscos averiado, se ha construido la cintura del robot con la plataforma giratoria del mismo. La cubierta del giradiscos, de plástico duro transparente, ha servido para realizar la estructura de los eslabones del brazo y antebrazo.
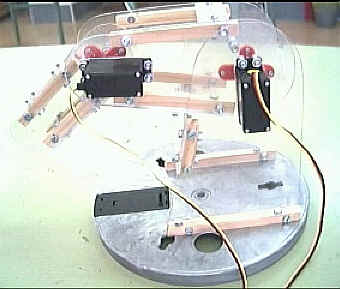

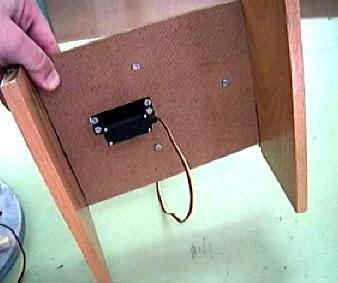
La cintura se ha instalado sobre una base fija de madera cuyos soportes los constituyen las tapaderas laterales de un cajón inservible.

El movimiento de las articulaciones se ha realizado con 3 servomotores
(Hitec S-300). Cada servo se ha unido solidariamente a un eslabón de forma que
la rotación de su eje arrastre al eslabón consecutivo.

El control de los servos se realiza a través del puerto paralelo del PC. Para ello se utiliza directamente la interfaz simple con un programada realizado en Turbo C, tal como aparece descrito en la sección Control de actuadores mediante el puerto paralelo: actividades.
La línea de alimentación del servo puede ser común para todos pero,
obviamente, debe existir una línea de control por cada motor. Así, se utilizan
los pines 3, 4 y 5 para las líneas de control y el código del programa
simultanea la activación/desactivación de los tres.
Puesto que la velocidad de los servos es demasiado elevada, es
preciso rebajarla por programa, enviando el robot a posiciones intermedias al
ritmo requerido y no directamente a la posición final.
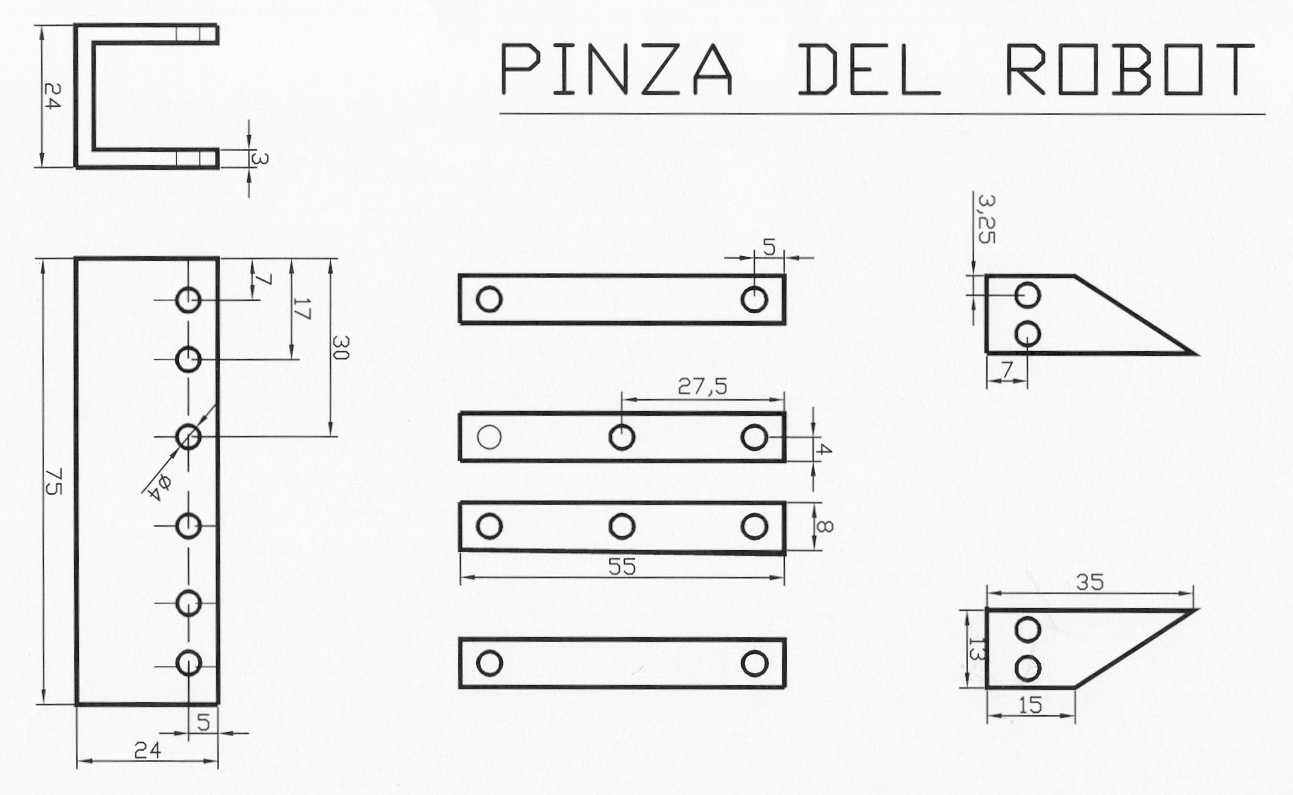
La pinza se halla todavía en fase de construcción. En la figura adjunta se muestra el despiece de lo que será su estructura. La apertura/cierre de la misma se activará mediante un motor de c.c. (controlado con la interfaz apropiada). El motor girará una palanca instalada en su eje que "dará un tirón" de unos alambres (extraídos del sistema de freno de una bicicleta) que harán, a su vez, pivotar los dedos de la pinza para producir su apertura (el motor debe actuar en tanto se desee que la pinza permanezca abierta). Unos topes mecánicos limitarán el ángulo barrido por el motor y un resorte proporcionará la fuerza necesaria para el agarre de piezas livianas.
Dado que cada servomotor se puede adquirir por unos 12 € y que la electrónica de control es sumamente barata, el robot resulta relativamente económico.
El robot así construido y controlado resulta algo "tembloroso" debido a las imprecisiones de las temporizaciones de precisión realizadas por programa. Si se quiere mejorar el resultado, se puede utilizar un circuito que genere por hardware los pulsos de control de los servos.
Una mejor opción la pueden constituir los motores paso a paso, los más económicos en torno a los 18 €, cuyo circuito de control mediante el puerto paralelo es también sumamente simple, al igual que el programa.

![]()
![]()