Robots

![]()
Robots |
|
|
|
|
|
|
|
A continuación se muestran los robots a controlar en este curso. Partiremos del modelo de robot de un grado de libertad para acabar con el robot industrial de brazo plegable. Aprendiendo a programar un robot industrial: el soldador o el robot de columna se programan de igual forma.
Brazo de robot de soldadura: modelo básico -1 grado de libertad-
|
|
Dispone de los siguientes elementos:
1 motor: para la "cintura" del brazo soldador. M1
1 lámpara que representa el electrodo de soldadura. M2
1 final de carrera que marca la posición origen (home) del brazo, E1
1 pulsador que actuará como contador de impulsos del motor , E2
1 pulsador de "Inicio" de operación. E8

La posición del robot se lleva a cabo contando los impulsos que registra la entrada E2 cuando es golpeada por los dientes de una rueda dentada (4 dientes) que gira impulsada por el motor en cuestión. En cada vuelta del motor abre y cierra el pulsador 4 veces.
La posición de origen del robot es aquella en la que un pulsador conectado a la entrada digital E1, actuando como final de carrera, se encuentra pulsado por un saliente.
Para detalles y montaje paso a paso, véase "Instrucciones de montaje" del Computing Starter de fischertechnik, página 21.
![]()
![]()
|

|
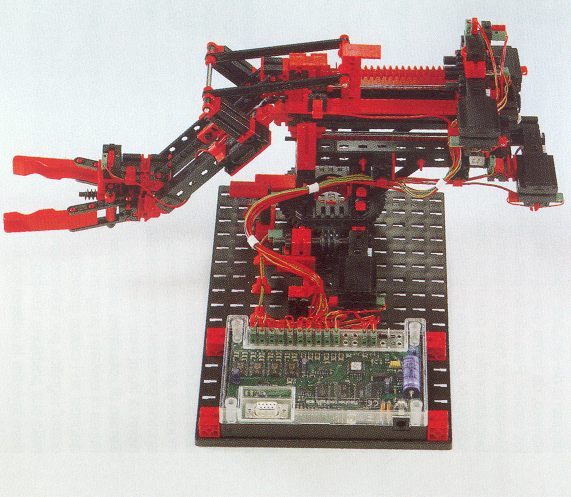
Tipo: robot industrial manipulador.
3 grados de libertad (3 articulaciones independientes) y una pinza como elemento terminal.
Cuenta con dos juntas de rotación y una prismática, cuyos movimientos son: rotacional (cintura), lineal (avance del hombro) y angular (giro del codo). No se trata exactamente de una configuración esférica/polar clásica, ya que no es el hombro el que gira y el antebrazo el que se extiende, sino que el hombro avanza y el codo gira.
 |
|
Dispone de los siguientes elementos:
4 motores: para las tres articulaciones del robot (cintura, hombro, codo) y la pinza (garra).
4 para los pulsadores de final de carrera que marcan las posiciones origen (home) de cada articulación.
4 para los pulsadores que actúan como contadores de impulsos de cada motor. Fijan la posición de las articulaciones.
Los motores se pueden conectar a las 4 primeras salidas digitales/de motor (M1, M2, M3, M4). Los finales de carrera y los contadores de pasos de cada motor se pueden distribuir en las entradas así:
| Articulación | Motor | Final de carrera | Contador de impulsos |
| 1. Cintura | M1 (rotación cintura) |
E1 | E2 |
| 2. Hombro | M2 (avance hombro) |
E3 | E4 |
| 3. Codo | M3 (giro codo) |
E5 | E6 |
| 4. Pinza | M4 (pinza) |
E7 | E8 |

Para detalles y montaje paso a paso, véase "Instrucciones de montaje" de Industry Robots de fischertechnik, página 29.
![]()
![]()